- 2022-09-27 发布 |
- 37.5 KB |
- 7页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
空间3_pus_up并联机构运动灵巧性与刚度性能研究
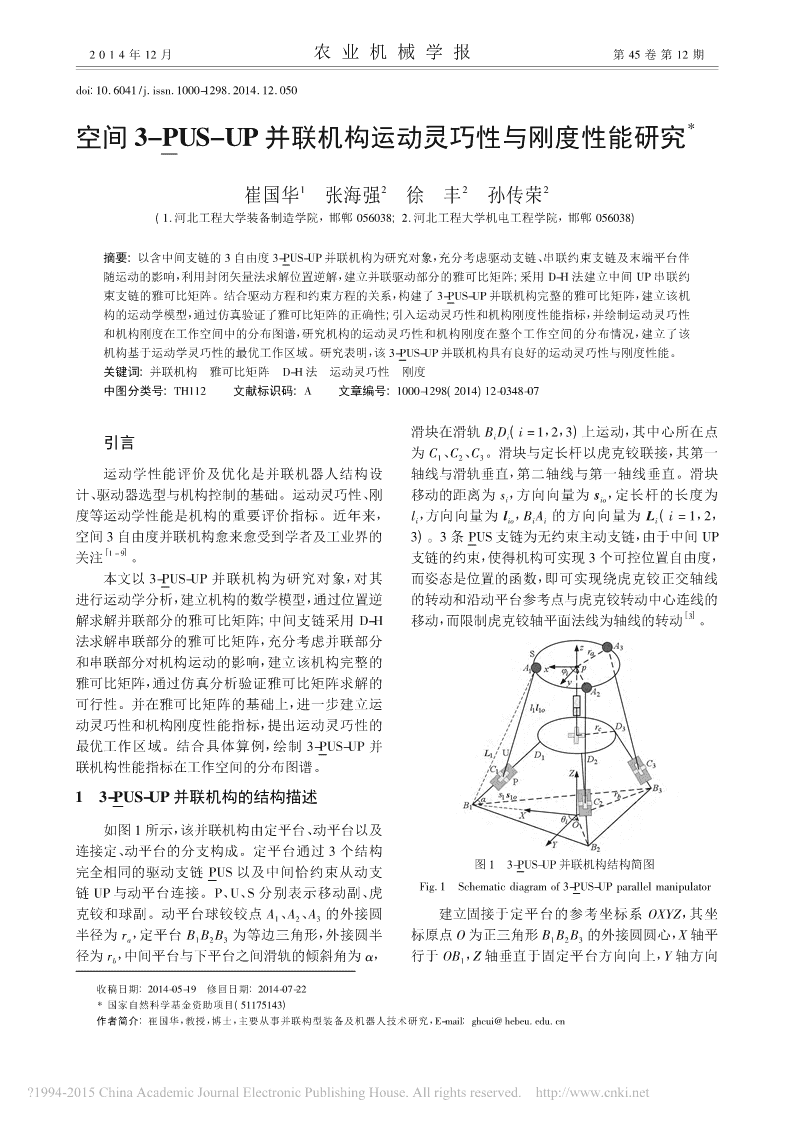
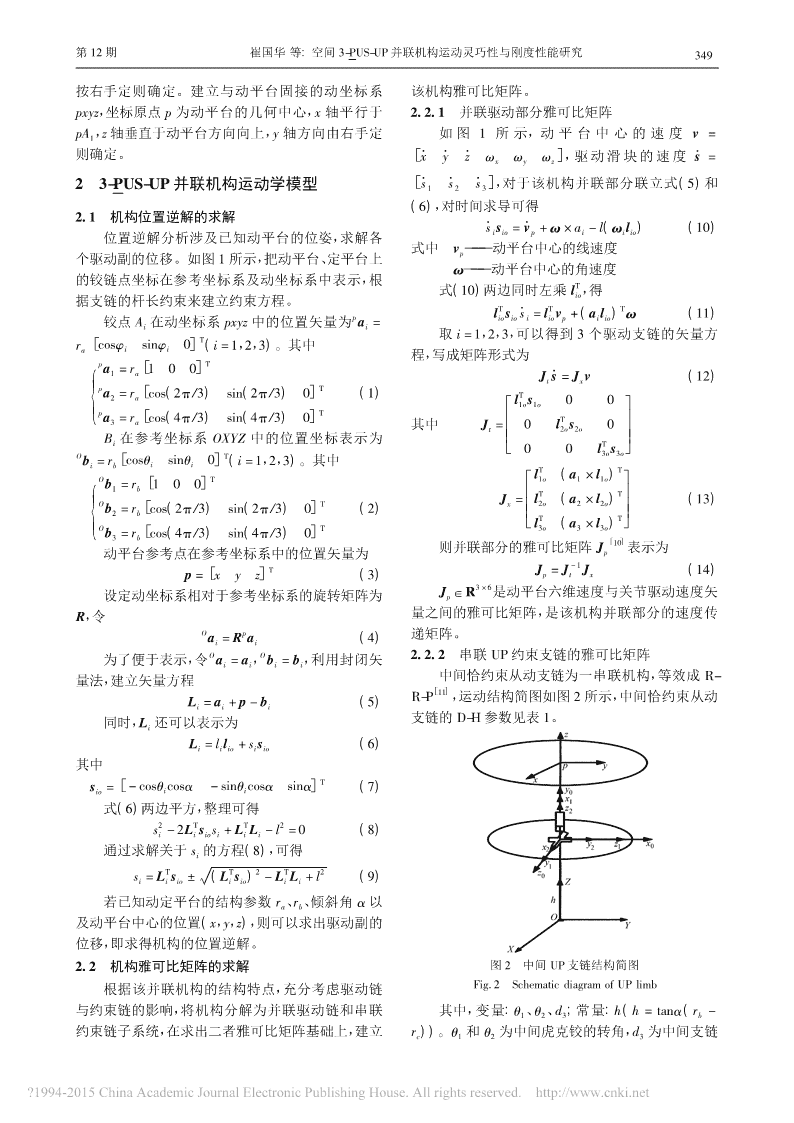
2014年12月农业机械学报第45卷第12期doi:10.6041/j.issn.1000-1298.2014.12.050*空间3-PUS-UP并联机构运动灵巧性与刚度性能研究1222崔国华张海强徐丰孙传荣(1.河北工程大学装备制造学院,邯郸056038;2.河北工程大学机电工程学院,邯郸056038)摘要:以含中间支链的3自由度3-PUS-UP并联机构为研究对象,充分考虑驱动支链、串联约束支链及末端平台伴随运动的影响,利用封闭矢量法求解位置逆解,建立并联驱动部分的雅可比矩阵;采用D-H法建立中间UP串联约束支链的雅可比矩阵。结合驱动方程和约束方程的关系,构建了3-PUS-UP并联机构完整的雅可比矩阵,建立该机构的运动学模型,通过仿真验证了雅可比矩阵的正确性;引入运动灵巧性和机构刚度性能指标,并绘制运动灵巧性和机构刚度在工作空间中的分布图谱,研究机构的运动灵巧性和机构刚度在整个工作空间的分布情况,建立了该机构基于运动学灵巧性的最优工作区域。研究表明,该3-PUS-UP并联机构具有良好的运动灵巧性与刚度性能。关键词:并联机构雅可比矩阵D-H法运动灵巧性刚度中图分类号:TH112文献标识码:A文章编号:1000-1298(2014)12-0348-07滑块在滑轨BiDi(i=1,2,3)上运动,其中心所在点引言为C1、C2、C3。滑块与定长杆以虎克铰联接,其第一运动学性能评价及优化是并联机器人结构设轴线与滑轨垂直,第二轴线与第一轴线垂直。滑块计、驱动器选型与机构控制的基础。运动灵巧性、刚移动的距离为si,方向向量为sio,定长杆的长度为度等运动学性能是机构的重要评价指标。近年来,li,方向向量为lio,BiAi的方向向量为Li(i=1,2,空间3自由度并联机构愈来愈受到学者及工业界的3)。3条PUS支链为无约束主动支链,由于中间UP[1-9]关注。支链的约束,使得机构可实现3个可控位置自由度,本文以3-PUS-UP并联机构为研究对象,对其而姿态是位置的函数,即可实现绕虎克铰正交轴线进行运动学分析,建立机构的数学模型,通过位置逆的转动和沿动平台参考点与虎克铰转动中心连线的[3]解求解并联部分的雅可比矩阵;中间支链采用D-H移动,而限制虎克铰轴平面法线为轴线的转动。法求解串联部分的雅可比矩阵,充分考虑并联部分和串联部分对机构运动的影响,建立该机构完整的雅可比矩阵,通过仿真分析验证雅可比矩阵求解的可行性。并在雅可比矩阵的基础上,进一步建立运动灵巧性和机构刚度性能指标,提出运动灵巧性的最优工作区域。结合具体算例,绘制3-PUS-UP并联机构性能指标在工作空间的分布图谱。13-PUS-UP并联机构的结构描述如图1所示,该并联机构由定平台、动平台以及连接定、动平台的分支构成。定平台通过3个结构图13-PUS-UP并联机构结构简图完全相同的驱动支链PUS以及中间恰约束从动支Fig.1Schematicdiagramof3-PUS-UPparallelmanipulator链UP与动平台连接。P、U、S分别表示移动副、虎克铰和球副。动平台球铰铰点A1、A2、A3的外接圆建立固接于定平台的参考坐标系OXYZ,其坐半径为ra,定平台B1B2B3为等边三角形,外接圆半标原点O为正三角形B1B2B3的外接圆圆心,X轴平径为rb,中间平台与下平台之间滑轨的倾斜角为α,行于OB1,Z轴垂直于固定平台方向向上,Y轴方向收稿日期:2014-05-19修回日期:2014-07-22*国家自然科学基金资助项目(51175143)作者简介:崔国华,教授,博士,主要从事并联构型装备及机器人技术研究,E-mail:ghcui@hebeu.edu.cn\n第12期崔国华等:空间3-PUS-UP并联机构运动灵巧性与刚度性能研究349按右手定则确定。建立与动平台固接的动坐标系该机构雅可比矩阵。pxyz,坐标原点p为动平台的几何中心,x轴平行于2.2.1并联驱动部分雅可比矩阵pA1,z轴垂直于动平台方向向上,y轴方向由右手定如图1所示,动平台中心的速度v=····则确定。[xyzωxωyωz],驱动滑块的速度s=···23-PUS-UP并联机构运动学模型[s1s2s3],对于该机构并联部分联立式(5)和(6),对时间求导可得2.1机构位置逆解的求解··sisio=vp+ω×ai-l(ωilio)(10)位置逆解分析涉及已知动平台的位姿,求解各式中vp———动平台中心的线速度个驱动副的位移。如图1所示,把动平台、定平台上ω———动平台中心的角速度的铰链点坐标在参考坐标系及动坐标系中表示,根T式(10)两边同时左乘lio,得据支链的杆长约束来建立约束方程。T·TTpliosiosi=liovp+(ailio)ω(11)铰点Ai在动坐标系pxyz中的位置矢量为ai=T取i=1,2,3,可以得到3个驱动支链的矢量方ra[cosφisinφi0](i=1,2,3)。其中程,写成矩阵形式为pTa1=ra[100]·Jts=Jxv(12)pTa2=ra[cos(2π/3)sin(2π/3)0](1)lTs00{é1o1oùTpa3=ra[cos(4π/3)sin(4π/3)0]=ê0lTs0ú其中Jtê2o2oúBi在参考坐标系OXYZ中的位置坐标表示为êTúOTë00l3os3oûbi=rb[cosθisinθi0](i=1,2,3)。其中TTOTél1o(a1×l1o)ùb1=rb[100]êTTúOTJx=êl2o(a2×l2o)ú(13)b2=rb[cos(2π/3)sin(2π/3)0](2)êú{TTOTël3o(a3×l3o)ûb3=rb[cos(4π/3)sin(4π/3)0][10]则并联部分的雅可比矩阵Jp表示为动平台参考点在参考坐标系中的位置矢量为-1p=[xyz]T(3)Jp=JtJx(14)3×6设定动坐标系相对于参考坐标系的旋转矩阵为Jp∈R是动平台六维速度与关节驱动速度矢R,令量之间的雅可比矩阵,是该机构并联部分的速度传Oa=Rpa(4)递矩阵。iiOa=a,Ob=b,利用封闭矢2.2.2串联UP约束支链的雅可比矩阵为了便于表示,令iiii中间恰约束从动支链为一串联机构,等效成R-量法,建立矢量方程[11]R-P,运动结构简图如图2所示,中间恰约束从动Li=ai+p-bi(5)支链的D-H参数见表1。同时,Li还可以表示为Li=lilio+sisio(6)其中Tsio=[-cosθicosα-sinθicosαsinα](7)式(6)两边平方,整理可得2TT2si-2Lisiosi+LiLi-l=0(8)通过求解关于si的方程(8),可得TT2T2si=Lisio±槡(Lisio)-LiLi+l(9)若已知动定平台的结构参数ra、rb、倾斜角α以及动平台中心的位置(x,y,z),则可以求出驱动副的位移,即求得机构的位置逆解。2.2机构雅可比矩阵的求解图2中间UP支链结构简图Fig.2SchematicdiagramofUPlimb根据该并联机构的结构特点,充分考虑驱动链与约束链的影响,将机构分解为并联驱动链和串联其中,变量:θ1、θ2、d3;常量:h(h=tanα(rb-约束链子系统,在求出二者雅可比矩阵基础上,建立rc))。θ1和θ2为中间虎克铰的转角,d3为中间支链\n350农业机械学报2014年沿杆方向的位移,h为中间平台到定平台的距离。r41=Q0a41+Q0Q1a42+Q0Q1Q2a43表1中间恰约束从动支链的D-H参数r42=Q0Q1a42+Q0Q1Q2a43Tab.1D-Hparametersofconstraintpassivelimbr43=Q0Q1Q2a43Tiθi/(°)diaiαi/(°)其中a4i=[00di]090h090式中di———沿zi-1轴移动的距离1θ10090对于中间串联部分,速度映射模型为2θ2000·Jsθ=v(22)30d300T····T其中v=[vpω]θ=[θ1θ2d3]根据表1,采用D-H法可得到从固定坐标系到[12-13]则串联部分的雅可比矩阵为动坐标系的齐次变换矩阵e41×r41e42×r42e43RpJs=[](23)T=T0(h)T1(θ1)T2(θ2)T3(d3)=[01]e41e42O式中O———零矩阵(15)即其中é0d3sinθ2-cosθ2ùésinθ20-cosθ2ùêcosθcosθsinθcosθsinθúê-d3sinθ1sinθ2d3cosθ1cosθ2cosθ1sinθ2úR=ê12112ú(16)êúêsinθcosθ-cosθsinθsinθúêd3cosθ1sinθ2d3sinθ1sinθ2sinθ1sinθ2úë12212ûJ=sêú100-dcosθêúé32ùê0sinθ0úêú1p=d3cosθ1sinθ2(17)êúêêúúë0-cosθ0û1ëd3sinθ1sinθ2+hû(24)式中R———旋转矩阵p———位置矢量6×3Js∈R是串联部分的雅可比矩阵,表示从关联立式(3)和(17),可以得到节空间向操作空间运动的速度传递的广义传动比。222ìd3=槡x+y+(z-h)2.2.33-PUS-UP机构雅可比矩阵的建立ïï=acos-x驱动方程和约束方程建立的运动学模型可以反íθ2(d)(18)3映并联机器人机构的整体运动特性,由于机构在运ïz-hyïîθ1=atan2(,)动过程中,动平台有沿X轴、Y轴移动的伴随运d3sinθ2d3sinθ2[14]动,为了避免少自由度并联机构雅可比矩阵元素从固定坐标系到从动支链第i+1个坐标系的的量纲不一致问题,而导致并联机构的输入运动与旋转矩阵为Qi(i=0,1,2,3),则输出运动之间的映射关系失真。本文可利用驱动和écosθi0sinθiù约束方程之间的关系,将矩阵元素做归一化处理。Qi=êsinθi0-cosθiú(19)··êú由于姿态是位置的函数,可以用关于位置x、y、ë010û···z的函数表示θ1和θ2。于是,旋转矩阵R可以表示成中间从动支链关取Js矩阵的前3行作为新的矩阵J's,可以得到[11]于3个关节变量的函数,即J'[·θ··]T=[·x··]T(25)R=Q0Q1Q2Q3(20)s1θ2d3yz··-1e4i为旋转矩阵Q0Q1…Qi-1的第3列,也就是式(25)两边同时乘以J's,整理可得θ1和θ2···zi-1轴上的单位向量,即与x、y、z的关系式ìe41=Q0e40ésinθ1cosθ1ù··0-éxùïïe42=Q0Q1e40éθ1ùêd3sinθ2d3sinθ2úêú=êúê·yúí(21)ê·úsinθcosθcosθêúïe43=Q0Q1Q2e40ëθ2ûêê222úú·ï2×1ëzûTëd3d3cosθ1d3sinθ1û2×33×1îe40=[001](26)式中e40———Z轴上的单位向量··r4i表示第i-1个坐标系原点到第4个坐标系根据式(22)和(24),还可以得出关于θ1和θ2原点的位置矢量,具体可以表示为与ωx、ωy、ωz的关系式\n第12期崔国华等:空间3-PUS-UP并联机构运动灵巧性与刚度性能研究351éωxùé10ù·式中W———可达工作空间éθùêúê0sinθú1在可达工作空间的基础上,定义工作空间中局ωy=1êú(27)êúêúê·úêωúë0-cosθûëθ2û2×1部运动灵巧性GCI≤LCI≤LCImax的集合为该新型并联ëzû13×23×1[16]联立式(26)和(27),整理可得机构在可达工作空间内的最优工作区域。ω=Jcvp(28)3.2机构刚度指标线速度vp可以写成通常采用刚度矩阵K的最大和最小特征值作[17-18]vp=Ivp(29)为评价机构刚度性能的指标。式中I———单位对角矩阵刚度矩阵可以表示为T于是,恰约束从动支链的速度映射方程可以表K=JkiJ(35)示为式中ki———驱动副的关节刚度·=k=k=k=1000N/mm,则éxù设定关节刚度k123vpê·ú[19][]=Jqy(30)刚度矩阵K可表示为ωêúTë·zûK=kJJ(36)其中Jq=将刚度问题归结为矩阵的特征值和特征向量的100问题,设K为3阶方阵,如果存在数λ和3维非零éùê010ú列向量ε使关系式êú001Kε=λε(37)êúêsinθcosθú成立,数λ称为矩阵K的特征值,非零向量ε称为K11ê0-úêd3sinθ2d3sinθ2ú的对应特征值λ下的特征向量。êsinθsinθsinθcosθcosθcosθsin2θú在给定机构的位置可以求出刚度矩阵的特征值1211211êúêd3d3d3úλi,εi是特征值所对应的特征向量,λi的意义表示êcosθsinθcos2θcosθsinθcosθcosθú的是并联机构在εi方向的刚度。用λmax和λmin分别ê1212112ú---ëdddû代表的最大和最小特征值,并联机构在给定位置处333(31)的最大和最小刚度就发生在εmax和εmin方向。联立式(14)和(31),可得并联机构总的雅可比4并联机构运动学仿真分析与验证矩阵为J=JpJq(32)对于图1所示的并联机构,设定结构参数ra=式(32)中的J∈R3×3是3-PUS-UP并联机构秩为3π0.25m,rb=0.75m,rc=0.4m,l=0.75m,α=。4的完整雅可比矩阵。设定动平台的运动轨迹为3并联机构运动性能指标的建立πìx=-0.15sin(t)ï10考虑该机构的工作需求及条件,本文引入运动ïïπ灵巧性和刚度作为其性能评价指标。íy=0.15cos(t)(38)10ï3.1运动灵巧性ïïπ通常把雅可比矩阵条件数的倒数定义为局部条îz=0.75-0.01cos(t)20件数(LCI)作为运动学巧性的量度由速度逆解LCI=1/κ(J)(33)[·s·s·s]T=J[·x··]T(39)123yz-1其中κ(J)=‖J‖‖J‖按照设定的运动轨迹,通过Matlab编程可得3式中κ(J)———雅可比矩阵条件数个驱动副的速度变化规律曲线,如图3a所示。同通常0≤LCI≤1,LCI=0,表明机构处于奇异位时,基于多体系统动力学仿真软件RecurDyn对本文置;LCI=1,表明该位形各向同性,此时机构具有最所论述机构的虚拟样机进行仿真,可以获得机构输佳的运动传递性能。为了评估机构在整个工作空间入与输出位置参数之间的映射曲线,如图3b所示。[15]的灵巧性,Gosselin提出了全局灵巧性指标图3b所得曲线与利用等式(39)编程所得的速∫WLCIdW度曲线求解结果是一致的。通过虚拟样机仿真验证GCI=(34)dW说明雅可比矩阵的理论求解是正确的,前期的数学\n352农业机械学报2014年图5理想工作空间内的运动灵巧性分布Fig.5Atlasofthekinematicdexterityinidealworkspace图3驱动副速度-时间曲线Fig.3Timehistoryofdrivingjointvelocity(a)Matlab编程(b)Recurdyn仿真图6可达工作空间的运动灵巧性分布建模过程是可行的,这为后续性能指标的计算建立Fig.6Atlasofthekinematicdexterityinthereachableworkspace了理论基础。运动学灵巧性的分布规律。5应用算例与机构性能分析从图6中可以看出,机构的运动灵巧性随机构对于图1所示的并联机构,设定工作空间的搜位形的变化而变化,局部运动灵巧性的变化范围为索范围为-0.4m≤x≤0.4m,-0.4m≤y≤0.4m,(0.3530,0.9957),局部运动灵巧性越大,说明机构0.5m≤z≤1m;设定驱动副的位移si的范围为(0,的传递性能越好,精度越高。π根据第4节给定的机构参数和式(33)、(34),0.5m),虎克铰的最大转角Ui为,球铰的最大转2可以得到LCImax=0.9957,GCI=0.5362,则该机构在角S为π。可达工作空间内的最优区域为(0.5362,0.9957)。i3图7为该并联机构局部运动灵巧性在最优工作区域5.1运动学灵巧性分析的分布。对并联机构进行轨迹规划时,应尽量满足图4表示动平台在不同高度下局部条件数的分机构在最优工作区域内工作,使机构具有较好的运布情况。机构在Z方向移动越小,机构的局部条件动学性能,从而提高机构的运动精度和控制精度。数越接近于1,说明机构的运动灵巧性越好,运动精度越高。而且局部条件数在(0,1)之间连续变化,没有突变,说明该机构的运动灵巧性较好。图7运动学灵巧性的最优工作区域Fig.7Optimumregionofthekinematicdexterity图4不同高度下局部条件数的分布图5.2机构刚度分析Fig.4Atlasofthelocalconditionindexunder图8和图9给出了z=0.95m的工作平面内differentheight3-PUS-UP并联机构的最大刚度和最小刚度图谱,图5为给定三维空间下不考虑约束条件的整个图10和图11给出了机构在工作空间内最大和最小工作空间内局部运动灵巧性的分布规律。刚度的方向。图6为考虑约束条件下的可达工作空间内局部图8和图9反映了刚度的等值线分布情况,由\n第12期崔国华等:空间3-PUS-UP并联机构运动灵巧性与刚度性能研究353图11并联机构的最小刚度方向图8并联机构的最大刚度映射图谱Fig.11VectordirectionoftheminimumFig.8Atlasofthemaximumstiffnessofparallelstiffnessofparallelmanipulatormanipulator方向实际上是最大和最小变形的方向,当终端作用力沿着特征向量的方向时,终端的变形也沿着特征向量的方向,变形值取得最大或最小。变形最大的方向,刚度最低,柔度最高;变形最小的方向,刚度最[20]高,柔度最低。因此,该3-PUS-UP并联机构在工作时应尽量使终端载荷的方向沿最小刚度的方向,使机构承载能力最佳。图9并联机构的最小刚度映射图谱6结论Fig.9Atlasoftheminimumstiffnessof(1)针对空间3自由度3-PUS-UP并联机构,充parallelmanipulator分考虑驱动支链、串联约束链及末端平台伴随运动的影响,利用封闭矢量法求解位置逆解建立并联驱动部分的雅可比矩阵;采用D-H法建立对中间UP串联约束支链的雅可比矩阵。结合驱动方程和约束方程的关系,构建3-PUS-UP并联机构完整的雅可比矩阵,建立该机构的运动学模型;并通过仿真验证了雅可比矩阵求解的正确性。图10并联机构的最大刚度方向(2)引入运动灵巧性和机构刚度性能指标,并Fig.10Vectordirectionofthemaximum绘制运动灵巧性和机构刚度在工作空间中的分布图stiffnessofparallelmanipulator谱,研究机构的运动灵巧性和机构刚度在整个工作于机构具有一定的对称性,其最大和最小刚度的分空间的分布情况,定义并计算机构可达工作空间的布也关于y轴具有一定的对称性;在工作空间内,最运动学灵巧性的最优工作区域。3大和最小刚度指标的变化范围分别为(3.35×10,(3)得到了该机构的运动灵巧性和机构刚度在3223.55×10)N/mm和(7.0×10,9.0×10)N/mm,整个工作空间的分布情况,以及运动灵巧性最优工刚度分布均匀、变化平稳、无突变,说明机构刚度性作区域,结果表明,该机构具有较好的运动灵巧性与能较好;图10和图11所代表的最大和最小刚度的刚度性能。参考文献1LiYangmin,XuQingsong.Anewapproachtothearchitectureoptimizationofageneral3-PUUtranslationalparallelmanipulator[J].JournalofIntelligentandRoboticSystems,2006,46(1):59-72.2PondG,CarreteroJA.Dexteritymeasuresandtheiruseinquantitativedexteritycomparisons[J].Meccanica,2011,46(1):51-64.3吴振勇,王玉茹,黄田.Tricept机器人的尺度综合方法研究[J].机械工程学报,2003,39(6):22-30.WuZhenyong,WangYuru,HuangTian.OptimaldimensionalsynthesisofTriceptrobot[J].ChineseJournalofMechanicalEngineering,2003,39(6):22-30.(inChinese)4WangYouyu,LiuHaitao,HuangTian.StiffnessmodelingoftheTriceptrobotusingtheoverallJacobianmatrix[J].JouranlofMechanismsandRobotics,2009,1(2):011002-1-8.5崔国华,周海栋,王南,等.基于Isight的3-UPS-S并联机器人机构多目标优化[J].农业机械学报,2013,44(9):261-266.CuiGuohua,ZhouHaidong,WangNan,etal.Multi-objectiveoptimizationof3-UPS-SparallelmechanismbasedonIsight[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2013,44(9):261-266.(inChinese)\n354农业机械学报2014年6齐明,刘海涛,梅江平,等.3-PUS/PU3自由度并联机构运动学优化设计[J].天津大学学报,2007,40(6):649-654.QiMing,LiuHaitao,MeiJiangping,etal.Kinematicsoptimumdesignofa3-DOFparallelmechanismwith3-PUS/PUarchitecture[J].JournalofTianjinUniversity,2007,40(6):649-654.(inChinese)7LiJian.Designof3-DOFparallelmanipulatorsformicro-motionapplications[D].Canada:UniversityofOntarioInstituteofTechnology,2009.8ChiZhongzhe,ZhangDan,XiaLian,etal.Multi-objectiveoptimizationofstiffnessandworkspaceforaparallelkinematicmachine[J].InternationalJournalofMechanicsandMaterialsinDesign,2013,9(3):281-293.9路懿.具有被动分支自由度为3和4并联机器人机构综合与性质研究[J].机械工程学报,2010,46(20):194.10LiYangmin,XuQingsong.Kinematicanalysisanddynamiccontrolofa3-PUUparallelmanipulatorforcardiopulmonaryresuscitation[C]∥Proceedingsofthe12thInternationalConferenceonAdvancedRobotics,2005:344-351.11SameerJoshi,Lung-WenTsai.Acomparisonstudyoftwo3-DOFparallelmanipulators:onewiththreeandtheotherwithfoursupportinglegs[C]∥IEEETransactionsonRoboticsandAutomation,2003,19(2):200-209.12ZhangDan,GaoZhen.Hybridheadmechanismofthegroundhog-likeminerescuerobot[J].RoboticsandComputerIntegratedManufacturing,2010,27(2):460-47013ZhangDan,GaoZhen.Forwardkinematics,performanceanalysis,andmulti-objectiveoptimizationofabio-inspiredparallelmanipulator[J].RoboticsandComputerIntegratedManufacturing,2012,8(4):484-492.14姚太克.一类三自由度并联机构的特性研究与优化设计[D].合肥:中国科学技术大学,2013.15GosselinC,AngelesJ.Aglobalperformanceindexforthekinematicoptimizationofroboticmanipulator[J].ASMEJournalofMechanicalDesign,1991,113(3):220-226.16WuJun,WangJinsong,WangLiping,etal.Performancecomparisonofthreeplanar3-DOFparallelmanipulatorswith4-RRR,3-RRRand2-RRRstructures[J].Mechatronics,2010,20(4):510-517.17CuiGuohua,WeiBin,WangNan,etal.Stiffness,workspaceanalysisandoptimizationfor3UPUparallelrobotmechanism[J].IndonesianJournalofElectricalEngineering,2013,11(9):5253-5261.18LiuXinjun,JinZhenlin,GaoFeng.Optimumdesignof3-DOFsphericalparallelmanipulatorswithrespecttotheconditioningandstiffnessindices[J].MechanismandMachineTheory,2000,35(9):1257-1267.19GaoZhen,ZhangDan.Performancemappingandmotionsimulationofa4UPS+PUredundantlyactuatedparallelmanipulators[C]∥ProceedingsofASME2010InternationalDesignEngineeringTechnicalConference&ComputersandInformationinEngineeringConference,2010,2:791-800.20韩书葵,方跃法,槐创锋.4自由度并联机器人刚度分析[J].机械工程学报,2006,42(增刊1):31-34.HanShukui,FangYuefa,HuaiChuangfeng.Stiffnessanalysisoffourdegreesparallelmanipulator[J].ChineseJournalofMechanicalEngineering,2006,42(Supp.1):31-34.(inChinese)KinematicDexterityandStiffnessPerformanceofSpatial3-PUS-UPParallelManipulator1222CuiGuohuaZhangHaiqiangXuFengSunChuanrong(1.SchoolofEquipmentandManufacturing,HebeiUniversityofEngineering,Handan056038,China2.SchoolofMechanicalandElectricalEngineering,HebeiUniversityofEngineering,Handan056038,China)Abstract:Threedegreesoffreedomparallelmanipulator3-PUS-UPwithaproperlyconstrainedpassivelimbwastakenastheresearchobjective.Inversekinematicssolutionequationswereformulatedwithclosedvectormethod,andaJacobianmatrixofparalleldrivingpartwasobtainedconsideringtheinfluencesofdrivingchains,constraintchainandparasiticmotionofmovingplatform.Further,aJacobianmatrixofUPlimbofserialpartwasacquiredbyadoptingtheD-Hmethod.Combiningtherelationbetweenthedrivingequationswithconstraintequations,acompleteJacobianmatrixofthe3-PUS-UPparallelmanipulatorwasconstructedandverifiedbysimulationanalysisonthebasisofthepreviouskinematicalmodel.Simultaneously,kinematicdexterityandstiffnesswereintroducedtoevaluatethekinematicperformance,anddistributionatlasofthekinematicdexterityandstiffnessintheworkspaceweredrawnandresearched.Theoptimumregionsofthekinematicdexterityinthereachableworkspaceweredefinedandcalculated.Theresearchresultsshowthatthis3-PUS-UPparallelmanipulatorhasgoodkinematicdexterityandstiffnessperformance.Keywords:ParallelmanipulatorJacobianmatrixD-HmethodKinematicdexterityStiffness查看更多