- 2022-09-27 发布 |
- 37.5 KB |
- 6页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
给定两连杆运动面的watt_i六杆机构空间解域综合方法
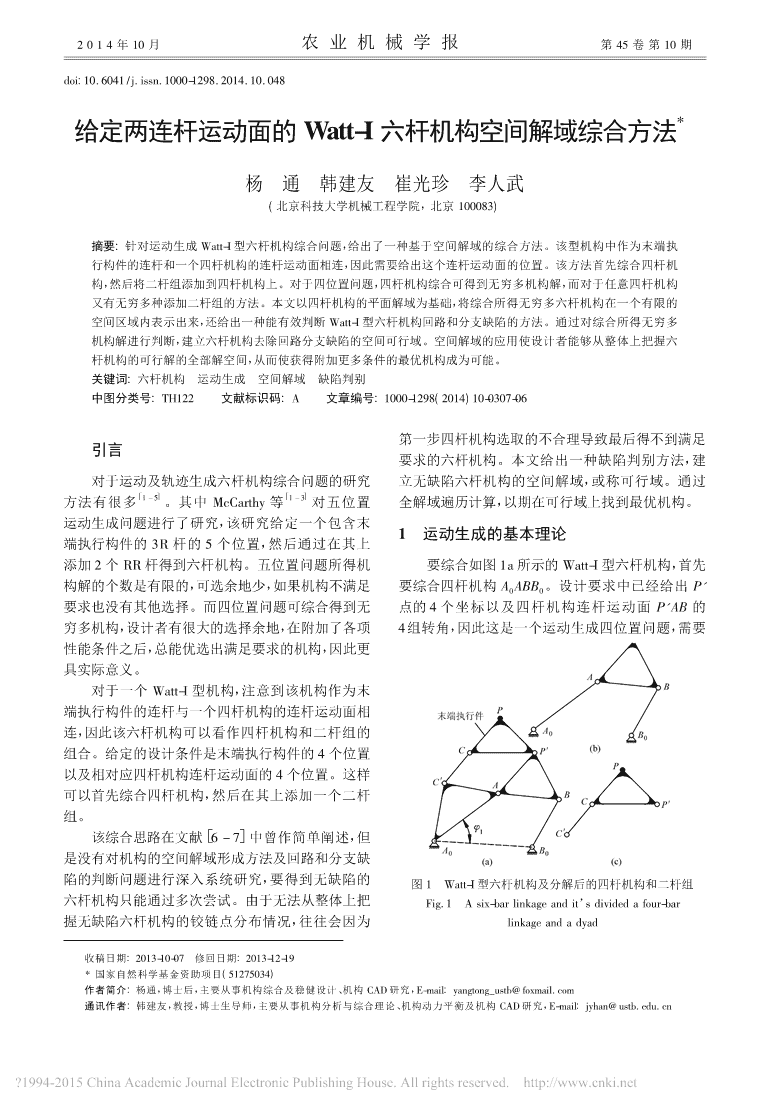
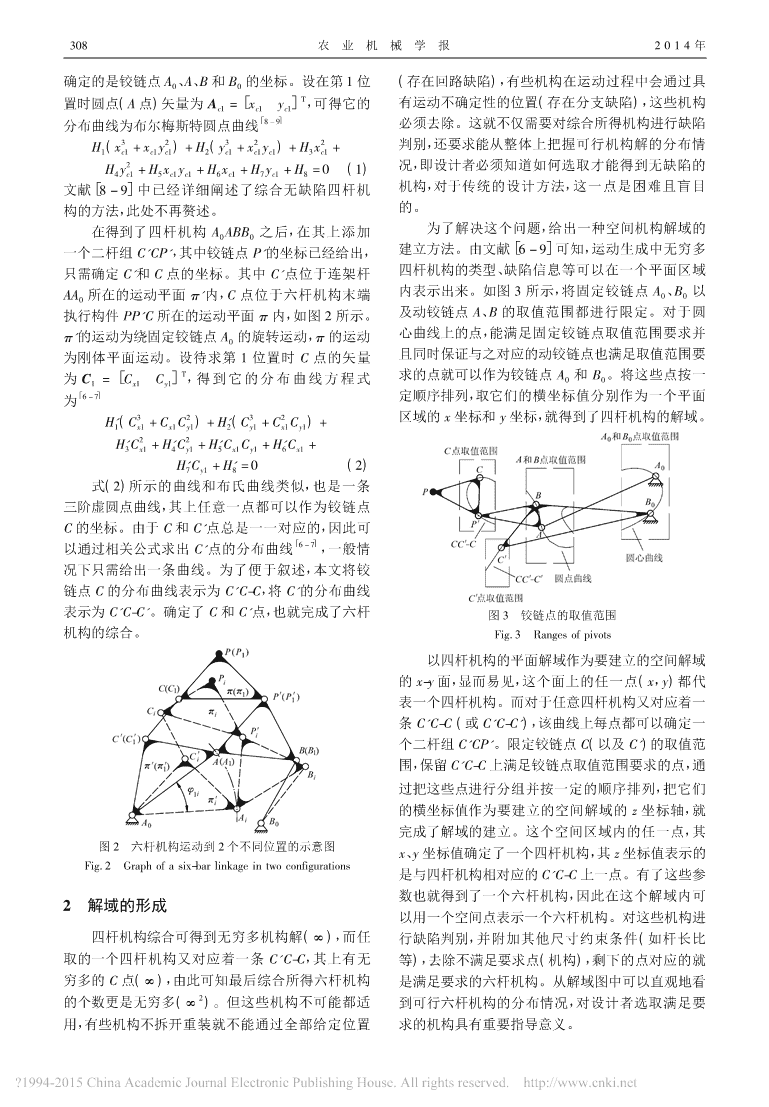
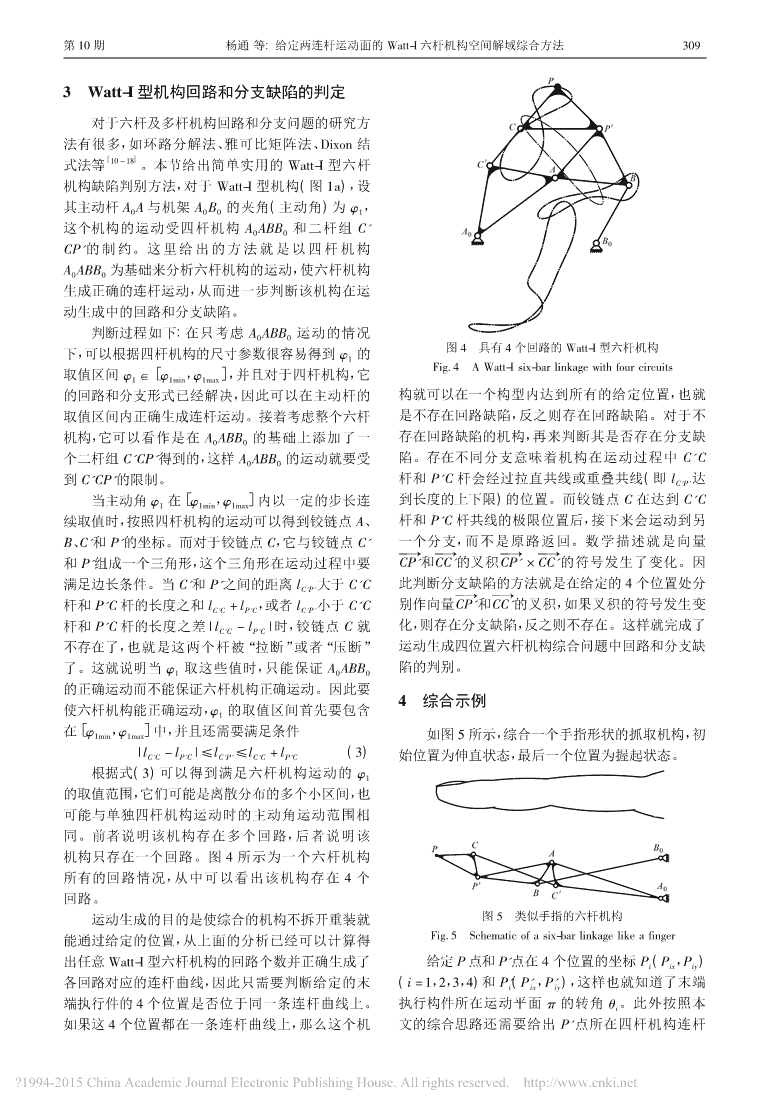
2014年10月农业机械学报第45卷第10期doi:10.6041/j.issn.1000-1298.2014.10.048*给定两连杆运动面的Watt-I六杆机构空间解域综合方法杨通韩建友崔光珍李人武(北京科技大学机械工程学院,北京100083)摘要:针对运动生成Watt-I型六杆机构综合问题,给出了一种基于空间解域的综合方法。该型机构中作为末端执行构件的连杆和一个四杆机构的连杆运动面相连,因此需要给出这个连杆运动面的位置。该方法首先综合四杆机构,然后将二杆组添加到四杆机构上。对于四位置问题,四杆机构综合可得到无穷多机构解,而对于任意四杆机构又有无穷多种添加二杆组的方法。本文以四杆机构的平面解域为基础,将综合所得无穷多六杆机构在一个有限的空间区域内表示出来,还给出一种能有效判断Watt-I型六杆机构回路和分支缺陷的方法。通过对综合所得无穷多机构解进行判断,建立六杆机构去除回路分支缺陷的空间可行域。空间解域的应用使设计者能够从整体上把握六杆机构的可行解的全部解空间,从而使获得附加更多条件的最优机构成为可能。关键词:六杆机构运动生成空间解域缺陷判别中图分类号:TH122文献标识码:A文章编号:1000-1298(2014)10-0307-06第一步四杆机构选取的不合理导致最后得不到满足引言要求的六杆机构。本文给出一种缺陷判别方法,建对于运动及轨迹生成六杆机构综合问题的研究立无缺陷六杆机构的空间解域,或称可行域。通过[1-5][1-3]方法有很多。其中McCarthy等对五位置全解域遍历计算,以期在可行域上找到最优机构。运动生成问题进行了研究,该研究给定一个包含末1运动生成的基本理论端执行构件的3R杆的5个位置,然后通过在其上添加2个RR杆得到六杆机构。五位置问题所得机要综合如图1a所示的Watt-I型六杆机构,首先构解的个数是有限的,可选余地少,如果机构不满足要综合四杆机构A0ABB0。设计要求中已经给出P'要求也没有其他选择。而四位置问题可综合得到无点的4个坐标以及四杆机构连杆运动面P'AB的穷多机构,设计者有很大的选择余地,在附加了各项4组转角,因此这是一个运动生成四位置问题,需要性能条件之后,总能优选出满足要求的机构,因此更具实际意义。对于一个Watt-I型机构,注意到该机构作为末端执行构件的连杆与一个四杆机构的连杆运动面相连,因此该六杆机构可以看作四杆机构和二杆组的组合。给定的设计条件是末端执行构件的4个位置以及相对应四杆机构连杆运动面的4个位置。这样可以首先综合四杆机构,然后在其上添加一个二杆组。该综合思路在文献[6-7]中曾作简单阐述,但是没有对机构的空间解域形成方法及回路和分支缺陷的判断问题进行深入系统研究,要得到无缺陷的图1Watt-I型六杆机构及分解后的四杆机构和二杆组六杆机构只能通过多次尝试。由于无法从整体上把Fig.1Asix-barlinkageandit’sdividedafour-bar握无缺陷六杆机构的铰链点分布情况,往往会因为linkageandadyad收稿日期:2013-10-07修回日期:2013-12-19*国家自然科学基金资助项目(51275034)作者简介:杨通,博士后,主要从事机构综合及稳健设计、机构CAD研究,E-mail:yangtong_ustb@foxmail.com通讯作者:韩建友,教授,博士生导师,主要从事机构分析与综合理论、机构动力平衡及机构CAD研究,E-mail:jyhan@ustb.edu.cn\n308农业机械学报2014年确定的是铰链点A0、A、B和B0的坐标。设在第1位(存在回路缺陷),有些机构在运动过程中会通过具T置时圆点(A点)矢量为Ac1=[xc1yc1],可得它的有运动不确定性的位置(存在分支缺陷),这些机构[8-9]必须去除。这就不仅需要对综合所得机构进行缺陷分布曲线为布尔梅斯特圆点曲线32322判别,还要求能从整体上把握可行机构解的分布情H1(xc1+xc1yc1)+H2(yc1+xc1yc1)+H3xc1+Hy2+Hxy+Hx+Hy+H=0(1)况,即设计者必须知道如何选取才能得到无缺陷的4c15c1c16c17c18文献[8-9]中已经详细阐述了综合无缺陷四杆机机构,对于传统的设计方法,这一点是困难且盲目构的方法,此处不再赘述。的。在得到了四杆机构A0ABB0之后,在其上添加为了解决这个问题,给出一种空间机构解域的一个二杆组C'CP',其中铰链点P'的坐标已经给出,建立方法。由文献[6-9]可知,运动生成中无穷多只需确定C'和C点的坐标。其中C'点位于连架杆四杆机构的类型、缺陷信息等可以在一个平面区域AA0所在的运动平面π'内,C点位于六杆机构末端内表示出来。如图3所示,将固定铰链点A0、B0以执行构件PP'C所在的运动平面π内,如图2所示。及动铰链点A、B的取值范围都进行限定。对于圆π'的运动为绕固定铰链点A0的旋转运动,π的运动心曲线上的点,能满足固定铰链点取值范围要求并为刚体平面运动。设待求第1位置时C点的矢量且同时保证与之对应的动铰链点也满足取值范围要为C=[CC]T,得到它的分布曲线方程式求的点就可以作为铰链点A0和B0。将这些点按一1x1y1为[6-7]定顺序排列,取它们的横坐标值分别作为一个平面H'(C3+CC2)+H'(C3+C2C)+区域的x坐标和y坐标,就得到了四杆机构的解域。1x1x1y12y1x1y122H3'Cx1+H4'Cy1+H5'Cx1Cy1+H6'Cx1+H7'Cy1+H8'=0(2)式(2)所示的曲线和布氏曲线类似,也是一条三阶虚圆点曲线,其上任意一点都可以作为铰链点C的坐标。由于C和C'点总是一一对应的,因此可[6-7]以通过相关公式求出C'点的分布曲线,一般情况下只需给出一条曲线。为了便于叙述,本文将铰链点C的分布曲线表示为C'C-C,将C'的分布曲线表示为C'C-C'。确定了C和C'点,也就完成了六杆图3铰链点的取值范围机构的综合。Fig.3Rangesofpivots以四杆机构的平面解域作为要建立的空间解域的x-y面,显而易见,这个面上的任一点(x,y)都代表一个四杆机构。而对于任意四杆机构又对应着一条C'C-C(或C'C-C'),该曲线上每点都可以确定一个二杆组C'CP'。限定铰链点C(以及C')的取值范围,保留C'C-C上满足铰链点取值范围要求的点,通过把这些点进行分组并按一定的顺序排列,把它们的横坐标值作为要建立的空间解域的z坐标轴,就完成了解域的建立。这个空间区域内的任一点,其图2六杆机构运动到2个不同位置的示意图x、y坐标值确定了一个四杆机构,其z坐标值表示的Fig.2Graphofasix-barlinkageintwoconfigurations是与四杆机构相对应的C'C-C上一点。有了这些参数也就得到了一个六杆机构,因此在这个解域内可2解域的形成以用一个空间点表示一个六杆机构。对这些机构进四杆机构综合可得到无穷多机构解(∞),而任行缺陷判别,并附加其他尺寸约束条件(如杆长比取的一个四杆机构又对应着一条C'C-C,其上有无等),去除不满足要求点(机构),剩下的点对应的就穷多的C点(∞),由此可知最后综合所得六杆机构是满足要求的六杆机构。从解域图中可以直观地看2的个数更是无穷多(∞)。但这些机构不可能都适到可行六杆机构的分布情况,对设计者选取满足要用,有些机构不拆开重装就不能通过全部给定位置求的机构具有重要指导意义。\n第10期杨通等:给定两连杆运动面的Watt-I六杆机构空间解域综合方法3093Watt-I型机构回路和分支缺陷的判定对于六杆及多杆机构回路和分支问题的研究方法有很多,如环路分解法、雅可比矩阵法、Dixon结[10-18]式法等。本节给出简单实用的Watt-I型六杆机构缺陷判别方法,对于Watt-I型机构(图1a),设其主动杆A0A与机架A0B0的夹角(主动角)为φ1,这个机构的运动受四杆机构A0ABB0和二杆组C'CP'的制约。这里给出的方法就是以四杆机构A0ABB0为基础来分析六杆机构的运动,使六杆机构生成正确的连杆运动,从而进一步判断该机构在运动生成中的回路和分支缺陷。判断过程如下:在只考虑A0ABB0运动的情况图4具有4个回路的Watt-I型六杆机构下,可以根据四杆机构的尺寸参数很容易得到φ1的Fig.4AWatt-Isix-barlinkagewithfourcircuits取值区间φ1∈[φ1min,φ1max],并且对于四杆机构,它的回路和分支形式已经解决,因此可以在主动杆的构就可以在一个构型内达到所有的给定位置,也就取值区间内正确生成连杆运动。接着考虑整个六杆是不存在回路缺陷,反之则存在回路缺陷。对于不机构,它可以看作是在A0ABB0的基础上添加了一存在回路缺陷的机构,再来判断其是否存在分支缺个二杆组C'CP'得到的,这样A0ABB0的运动就要受陷。存在不同分支意味着机构在运动过程中C'C到C'CP'的限制。杆和P'C杆会经过拉直共线或重叠共线(即lC'P'达当主动角φ1在[φ1min,φ1max]内以一定的步长连到长度的上下限)的位置。而铰链点C在达到C'C续取值时,按照四杆机构的运动可以得到铰链点A、杆和P'C杆共线的极限位置后,接下来会运动到另B、C'和P'的坐标。而对于铰链点C,它与铰链点C'一个分支,而不是原路返回。数学描述就是向量→→→→和P'组成一个三角形,这个三角形在运动过程中要CP'和CC'的叉积CP'×CC'的符号发生了变化。因满足边长条件。当C'和P'之间的距离lC'P'大于C'C此判断分支缺陷的方法就是在给定的4个位置处分→→杆和P'C杆的长度之和lC'C+lP'C,或者lC'P'小于C'C别作向量CP'和CC'的叉积,如果叉积的符号发生变杆和P'C杆的长度之差|lC'C-lP'C|时,铰链点C就化,则存在分支缺陷,反之则不存在。这样就完成了不存在了,也就是这两个杆被“拉断”或者“压断”运动生成四位置六杆机构综合问题中回路和分支缺了。这就说明当φ1取这些值时,只能保证A0ABB0陷的判别。的正确运动而不能保证六杆机构正确运动。因此要4综合示例使六杆机构能正确运动,φ1的取值区间首先要包含在[φ1min,φ1max]中,并且还需要满足条件如图5所示,综合一个手指形状的抓取机构,初|lC'C-lP'C|≤lC'P'≤lC'C+lP'C(3)始位置为伸直状态,最后一个位置为握起状态。根据式(3)可以得到满足六杆机构运动的φ1的取值范围,它们可能是离散分布的多个小区间,也可能与单独四杆机构运动时的主动角运动范围相同。前者说明该机构存在多个回路,后者说明该机构只存在一个回路。图4所示为一个六杆机构所有的回路情况,从中可以看出该机构存在4个回路。运动生成的目的是使综合的机构不拆开重装就图5类似手指的六杆机构Fig.5Schematicofasix-barlinkagelikeafinger能通过给定的位置,从上面的分析已经可以计算得出任意Watt-I型六杆机构的回路个数并正确生成了给定P点和P'点在4个位置的坐标Pi(Pix,Piy)各回路对应的连杆曲线,因此只需要判断给定的末(i=1,2,3,4)和P'i(P'ix,P'iy),这样也就知道了末端端执行件的4个位置是否位于同一条连杆曲线上。执行构件所在运动平面π的转角θi。此外按照本如果这4个位置都在一条连杆曲线上,那么这个机文的综合思路还需要给出P'点所在四杆机构连杆\n310农业机械学报2014年运动面π'在4个位置的转角θ'i,各种设计条件如构的综合。表1所示。表1给定的六杆机构末端执行件及四杆机构连杆运动面的四位置参数Tab.1Fourprescribedpositionsofsix-barlinkageend-effectorandfour-barlinkagecouplerplanePiθi/(°)P'iθ'i/(°)1(-19,10)-28.2(0,0)02(-4.25,-46.5)40.2(12.14,-32.63)453(34.5,-71.0)96.2(32.17,-49.67)804(84.5,-56.5)168.2(63.48,-52.12)133从实际应用角度考虑,为了使机构接近手指形状,本例中限定铰链点A0和B0的横坐标取值在图7四杆机构的平面可行解域60~90之间,铰链点A和B的横坐标取值在20~50Fig.7Feasibleplanarsolutionregionsoffour-barlinkage之间,铰链点C和C'的横坐标取值在-10~30之1.曲柄摇杆2.双摇杆3.摇杆曲柄4.双曲柄5.三摇杆间。此外限定所有待求铰链点的纵坐标取值范围都(内-外)摆动6.三摇杆(外-外摆动)7.三摇杆(外-内摆动)在-60~60之间,并要求杆长比lmax/lmin≤8。给出8.三摇杆(内-内摆动)的各运动面的位置及铰链点限定区域如图6所示。对于综合所得无穷多六杆机构,为了能够从整体上把握可行机构解的分布情况,这里根据前面所述的方法建立六杆机构的空间解域。如图8所示是去除了分支和回路缺陷并附加杆长比约束条件lmax/lmin≤8之后所得的六杆机构空间可行解域。该可行域内的每个点都代表一个满足设计要求的六杆机构,它的x和y坐标值分别确定了铰链点A0、A和B0、B的坐标,而从它的z坐标值可以得到铰链点C和C'的坐标。需要注意的是,由于z坐标轴表示的是经过排序的铰链点C的横坐标Cx,而不同C'C-C上满足铰链点位置要求的C点的个数是不一样的。也就是对于x-y面内的每一个点,与其对应的z轴的长度是不一样的,因此在图8中不便于统一标注z图6给定的设计条件轴的刻度。此处z轴上标注的是与下文中选定的四Fig.6Designrequirements杆机构((x,y)=(72.23,74.41))相对应的那条C'首先综合四杆机构A0ABB0,这是一个运动生成C-C上C点的横坐标。此外由于要对全部六杆机构四位置问题,连杆运动面上的四个位置都是已知的进行缺陷判别,所需的计算时间比较多,因此这里只(由点坐标P'i及连杆面转角θ'i确定)。建立四杆机给出空间可行域的一部分。构类型解域,通过缺陷判别去除存在回路和分支缺在图8所示的可行域内任意选点都可得到满足陷的部分,并要求杆长比lmax/lmin≤8,得到如图7所设计要求的六杆机构,但位于可行域内部的点由于示的可行机构解域,其中机构的分类方法参照文被遮挡而无法直接选取,在综合机构时还需要配合献[19-20]。使用解域图7。本例中在图8空间解域的x-y面上图7中标号为0的部分为不满足设计要求的区选择坐标为(x,y)=(72.23,74.41)的点,将这个点域,并且可以看出本例中只能得到双摇杆和内-外摆对应到图7所示的四杆机构平面解域中,可以看出动的三摇杆这两种类型的四杆机构。理论上在剩下得到的是一个双摇杆的四杆机构。它的各铰链点的的可行区域内任取一点就得到四杆机构A0ABB0,然坐标为:A0(72.20,1.03)、B0(74.40,16.68)、后计算出C'C-C。在该曲线上任取一点即可得到一A(24.17,4.75)、B(26.49,-4.96),该四杆机构如个二杆组,和已知的四杆机构相连就完成了六杆机图9所示。\n第10期杨通等:给定两连杆运动面的Watt-I六杆机构空间解域综合方法311图10C'C-C上的可行区段图8六杆机构的空间可行解域Fig.10FeasiblesectionsonC'C-CFig.8Feasiblespatialsolutionregionsofsix-barlinkage为了更直观地进行铰链点C和C'的选择,将与这个四杆机构相对应的曲线C'C-C上的各可行区段绘图,如图10所示。图11综合所得无缺陷六杆机构Fig.11SynthesizedWatt-Isix-barlinkage不存在回路缺陷。5结束语图9综合所得四杆机构A0ABB0Fig.9Synthesizedfour-barmechanismA0ABB0结合缺陷判别及解域方法对运动生成四位置如图10所示,在曲线C'C-C的可行区段上任取Watt-I型六杆机构的综合问题进行了研究。以四杆一点都可得到满足杆长比条件的无缺陷机构,此处机构的平面解域为基础建立可行六杆机构的空间分选择坐标为(0.60,15.97)的点作为铰链点C,与之布解域,空间可行域使设计者从总体上把握六杆机对应的作为铰链点C'的点坐标为(20.77,-4.29)。构的缺陷分布情况,指导设计者方便快捷地完成综最终综合的Watt-I型六杆机构如图11所示,可以看合任务。缺陷判别及可行域建立过程都可以通过程出这个机构存在两个回路,但是其中一个回路可以序自动实现,计算实例表明该方法简单有效,具有实通过所有4个给定位置,因此该机构并用价值。参考文献1McCarthyJM,SohGS.Geometricdesignoflinkages[M].2nded.NewYork:Springer-Verlag,2010.2SohGS,McCarthyJM.Thesynthesisofsix-barlinkagesasconstrainedplanar3Rchains[J].MechanismandMachineTheory,2008,43(2):160-170.3SohGS,YingFangtian,McCarthyJM.Dimensionalsynthesisofplanarsix-barlinkagesbymechanicallyconstrainaPRRserialchain[C]∥ProceedingsoftheASME2012InternationalDesignEngineeringTechnicalConferencesandComputersandInformationinEngineeringConference,DETC2012-70721.4TodorovTS.SynthesisofWatt'ssix-linkmechanismformanipulationactioninrelativespace[J].MechanismandMachineTheory,1997,32(5):559-568.\n312农业机械学报2014年5ShiakolasPS,KoladiyaD,KebrleJ.Ontheoptimumsynthesisofsix-barlinkagesusingdifferentialevolutionandthegeometriccentroidofprecisionpositionstechnique[J].MechanismandMachineTheory,2005,40(3):319-335.6HanJianyou,YangTong.Onthesolutionofregion-basedplanarsix-barmotiongenerationforfourfinitelyseparatedpositions[C]∥Proceedingsofthe36thASMEMechanismsandRoboticsConference,DETC2012-70211.7韩建友,杨通,尹来容,等.连杆机构现代综合理论与方法-解析理论、解域方法及软件系统[M].北京:高等教育出版社,2013.8YangTong,HanJianyou,YinLairong.Aunifiedsynthesismethodbasedonsolutionregionsforfourfinitelyseparatedandmixed“Point-Order”position[J].MechanismandMachineTheory,2011,46(11):1719-1731.9杨通,韩建友.复合四位置刚体导引机构综合的研究[J].农业机械学报,2011,42(3):203-207.YangTong,HanJianyou.Researchontherigid-bodyguidancemechanismsynthesisthroughfourmixedpositions[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2011,42(3):203-207.(inChinese)10WangJun,TingKL,XueChangyu.Discriminantmethodformoblilityidentificationofsingledegree-of-freedomdoubel-looplinkages[J].MechanismandMachineTheory,2010,45(5):740-755.11TingKL,WangJun,XueChangyu.Fullrotatabilityandsingularityofsix-barandgearedfive-barlikages[J].JournalofMechanismsandRobotics,2010,2(1):011011-011019.12KrishnamurtyS,TurcicDA.Branchingdeterminationinnon-dyadicplanarmulti-loopmechanisms[J].JournalofMechanicalDesign,1992,114(2):245-251.13WatanabeK,KatohH.Identificationofmotiondomainsofplanarsix-linkmechanismsoftheStephenson-type[J].MechanismandMachineTheory,2004,39(10):1081-1099.14ChaseTR,MirthJA.Circuitandbranchofsingle-degree-of-freedomplanarlinkages[J].JournalofMechanismDesign,1993,115(2):223-230.15邹炎火,郭晓宁.Stephenson-III型六杆机构死点位置的结式消元法识别[J].机械设计与研究,2010,26(2):32-34.16杭鲁滨,马培荪,杨廷力.基于Dixon析配法的平面三回路基本运动链装配构形求解[J].机械科学与技术,2003,22(3):366-368.HangLubin,MaPeisun,YangTingli.Configurationanalysisofplanar3-loopmechanismbasedonDixonresultantmethod[J].MechanicalScienceandTechnology,2003,22(3):366-368.(inChinese)17郭晓宁,褚金奎.Stephenson-II型六杆机构曲柄存在条件及判断方法[J].农业机械学报,2004,35(3):120-123.GuoXiaoning,ChuJinkui.IdentificationofacrankforStephenson-IIsix-barlinkage[J].TransactionsoftheChineseSocietyforAgriculturalMachinery,2004,35(3):120-123.(inChinese)18邹炎火,郭晓宁.基于Sturm定理的Stephenson-III六杆机构曲柄存在的判断[J].福州大学学报:自然科学版,2010,38(1):69-74.19BarkerC.Acompleteclassificationofplanarfour-barlinkages[J].MechanismandMachineTheory,1985,20(6):535-554.20LuckK,ModlerKH.Getriebetechnikanalyse-synthese-optimierung[M].Berlin:Akademie-Verlag,1990.SynthesisofWatt-ISix-barLinkageBasedonSpatialSolutionRegionforGivenTwoCouplerPlanesYangTongHanJianyouCuiGuangzhenLiRenwu(SchoolofMechanicalEngineering,UniversityofScienceandTechnologyBeijing,Beijing100083,China)Abstract:ThispaperaddressesthesynthesisproblemofWatt-Isix-barlinkagemotiongeneration,andintroducesanovelandconvenientsynthesisapproach.Thecouplerlinkusedasend-effectorofWatt-Iisconnectedtoacouplerplaneofafour-barlinkage,sothatthedesignersneedtogivethetaskpositionsofthesetwocouplerplanes.Withthemethod,afour-barlinkageissynthesizedfirstly,andthenadyadisattachedtothisfour-barlinkagetoobtainasix-barlinkage.Forfour-precision-positionproblems,four-barmotiongenerationcanproduceinfinitenumberofsolutions.Andforanyselectedfour-barlinkage,wecanpresentanequationofpivotcurvethateachpointonthiscurvecangenerateasatisfactorydyad.Basedontheplanarsolutionregionoffour-barlinkage,aninfinitenumberofsynthesizedsix-barlinkagesolutioncanbeexpressedinafinitespatialregion.Inaddition,thepaperstillputsforwardacircuitandbranchdefectsdistinguishmethodforWatt-Isix-barlinkage.Thefeasiblespatialmechanismsolutionregionswithoutanydefectsareobtainedbyusingthedistinguishmethod.Applicationofthespatialsolutionregionsmakesdesignerstobeabletounderstandtheinformationofthesynthesizedsix-barlinkagesonthewhole,andmakesitpossibletogettheoptimalsolutionthatattachedmoredesignrequirements.Keywords:Six-barlinkageMotiongenerationSpatialsolutionregionsDefectsdistinguish查看更多