低重频采样sar系统中地面运动目标参数估计
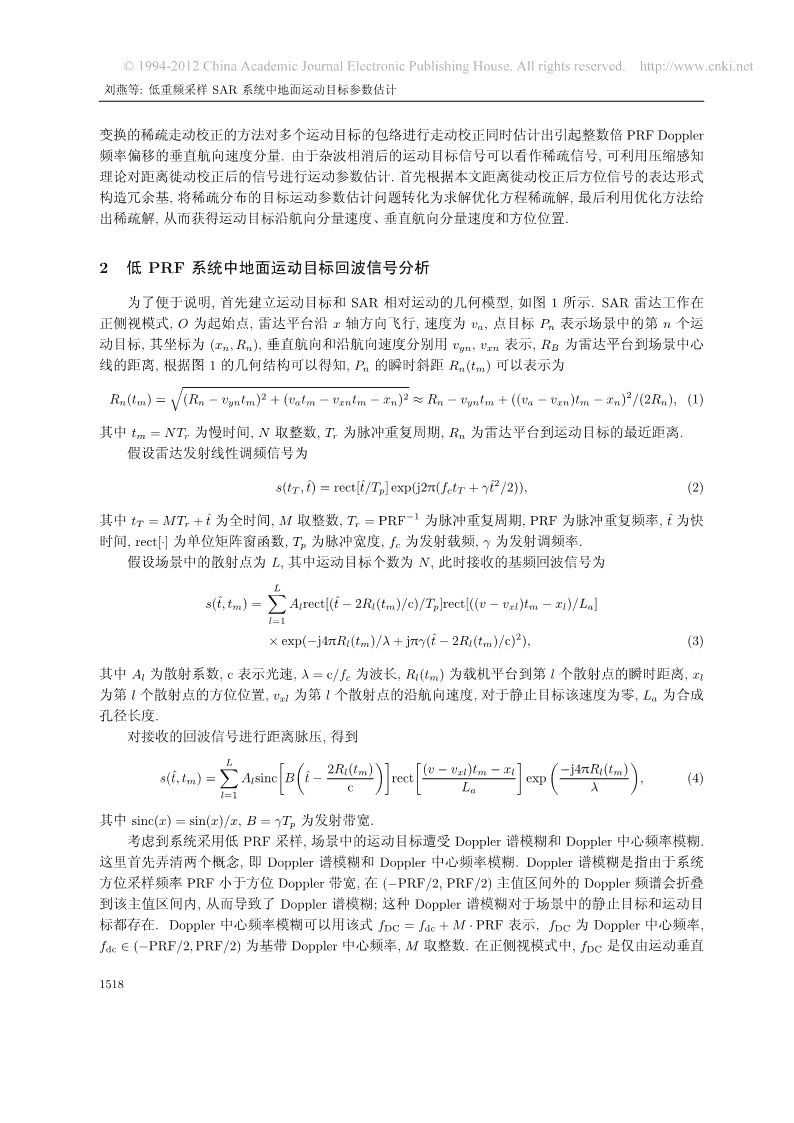
中国科学:信息科学2011年第41卷第12期:1517{1528www.scichina.cominfo.scichina.com论文低重频采样SAR系统中地面运动目标参数估计刘燕¤,武其松,孙光才,邢孟道,刘保昌,保铮西安电子科技大学雷达信号处理国家重点实验室,西安710071*通信作者.E-mail:liuyan1028@163.com收稿日期:2010{06{07;接受日期:2011{04{21国家自然科学基金(批准号:60890072)资助项目摘要低脉冲重复频率(pulserepetitionfrequency,PRF)采样合成孔径雷达(syntheticapertureradar,SAR)系统中运动目标回波信号存在Doppler谱模糊和Doppler中心频率模糊,这给运动目标参数估计带来了很大困难.由于杂波相消后的运动目标可以看作空间稀疏信号,基于压缩感知理论,本文提出一种低PRF采样SAR系统中的运动目标参数估计的新方法.首先采用基于Keystone变换的稀疏走动校正方法来实现包络走动校正和估计出引起整数倍PRFDoppler频率偏移的垂直航向速度分量,利用压缩感知(compressedsensing,CS)理论进行稀疏信号重建,将Doppler谱模糊的运动目标参数估计问题转化为求解优化方程稀疏解,最后利用优化方法获得运动目标的速度以及方位位置.仿真实验和实测数据都验证了本文方法的有效性.关键词合成孔径雷达运动目标运动参数估计Keystone变换走动校正压缩感知1引言合成孔径雷达对地观测应用越来越广泛,为了降低数据量或实现宽测绘成像通常会采用低脉冲重复频率(PRF)采样.由SAR成像理论可知,PRF必须不小于Doppler带宽,否则将会导致Doppler谱模糊,因而方位高分辨与宽测绘带成像构成了一对矛盾.针对该问题国内外学者提出了许多解决方法.集中体现为利用低PRF获得距离不模糊的宽测绘带,对于低PRF引起的Doppler谱模糊,利用零点控制[1¡3]、空域滤波[4¡6]以及多通道信号恢复方法[7]完成解模糊处理.但是上述处理方法仅限于对静止场景成像,没有考虑到场景中的运动目标信息.对于低PRF采样SAR成像中的运动目标,它的垂直航向速度还会引起Doppler中心偏移,当偏移量大于PRF时,就会导致Doppler中心模糊.对于存在Doppler谱模糊和Doppler中心模糊的运动目标的参数估计,传统的Doppler域参数估计方法[8;9]、分数阶Fourier变换[10]等非平稳信号处理方法都无能为力.文献[11]中提出空时自适应处理将地面运动目标的空时谱从空时平面上取出来实现运动目标检测,但是该方法要求沿航向通道数必须大于Doppler模糊数.针对低重频采样的SAR运动目标参数估计困难的问题,基于压缩感知理论,本文提出一种低PRF采样SAR系统中地面运动目标参数估计的新方法.利用距离脉压后的数据进行杂波相消以此保留了运动目标信息;通过方位dechirp技术去除了由雷达载体速度产生的Doppler调频项,采用基于Keystone引用格式:刘燕,武其松,孙光才,等.低重频采样SAR系统中地面运动目标参数估计.中国科学:信息科学,2011,41:1517{1528\n刘燕等:低重频采样SAR系统中地面运动目标参数估计变换的稀疏走动校正的方法对多个运动目标的包络进行走动校正同时估计出引起整数倍PRFDoppler频率偏移的垂直航向速度分量.由于杂波相消后的运动目标信号可以看作稀疏信号,可利用压缩感知理论对距离徙动校正后的信号进行运动参数估计.首先根据本文距离徙动校正后方位信号的表达形式构造冗余基,将稀疏分布的目标运动参数估计问题转化为求解优化方程稀疏解,最后利用优化方法给出稀疏解,从而获得运动目标沿航向分量速度、垂直航向分量速度和方位位置.2低PRF系统中地面运动目标回波信号分析为了便于说明,首先建立运动目标和SAR相对运动的几何模型,如图1所示.SAR雷达工作在正侧视模式,O为起始点,雷达平台沿x轴方向飞行,速度为va,点目标Pn表示场景中的第n个运动目标,其坐标为(xn;Rn),垂直航向和沿航向速度分别用vyn,vxn表示,RB为雷达平台到场景中心线的距离,根据图1的几何结构可以得知,Pn的瞬时斜距Rn(tm)可以表示为qR(t)=(R¡vt)2+(vt¡vt¡x)2¼R¡vt+((v¡v)t¡x)2=(2R);(1)nmnynmamxnmnnynmaxnmnn其中tm=NTr为慢时间,N取整数,Tr为脉冲重复周期,Rn为雷达平台到运动目标的最近距离.假设雷达发射线性调频信号为s(t;t^)=rect[t=T^]exp(j2¼(ft+°t^2=2));(2)TpcT¡1其中tT=MTr+t^为全时间,M取整数,Tr=PRF为脉冲重复周期,PRF为脉冲重复频率,t^为快时间,rect[¢]为单位矩阵窗函数,Tp为脉冲宽度,fc为发射载频,°为发射调频率.假设场景中的散射点为L,其中运动目标个数为N,此时接收的基频回波信号为XLs(t;t^m)=Alrect[(t^¡2Rl(tm)=c)=Tp]rect[((v¡vxl)tm¡xl)=La]l=1£exp(¡j4¼R(t)=¸+j¼°(t^¡2R(t)=c)2);(3)lmlm其中Al为散射系数,c表示光速,¸=c=fc为波长,Rl(tm)为载机平台到第l个散射点的瞬时距离,xl为第l个散射点的方位位置,vxl为第l个散射点的沿航向速度,对于静止目标该速度为零,La为合成孔径长度.对接收的回波信号进行距离脉压,得到L·µ¶¸·¸µ¶Xt^¡2Rl(tm)(v¡vxl)tm¡xl¡j4¼Rl(tm)s(t;t^m)=AlsincBrectexp;(4)cLa¸l=1其中sinc(x)=sin(x)=x,B=°Tp为发射带宽.考虑到系统采用低PRF采样,场景中的运动目标遭受Doppler谱模糊和Doppler中心频率模糊.这里首先弄清两个概念,即Doppler谱模糊和Doppler中心频率模糊.Doppler谱模糊是指由于系统方位采样频率PRF小于方位Doppler带宽,在(¡PRF/2,PRF/2)主值区间外的Doppler频谱会折叠到该主值区间内,从而导致了Doppler谱模糊;这种Doppler谱模糊对于场景中的静止目标和运动目标都存在.Doppler中心频率模糊可以用该式fDC=fdc+M¢PRF表示,fDC为Doppler中心频率,fdc2(¡PRF=2;PRF=2)为基带Doppler中心频率,M取整数.在正侧视模式中,fDC是仅由运动垂直1518\n中国科学:信息科学第41卷第12期图1正侧视SAR斜距平面几何示意图Figure1GeometryofbroadsideSARintheslantrangeplane航向速度决定的,当该频率大于PRF时就会出现Doppler中心频率模糊.从上述分析可以得出:正侧视SAR系统采用低PRF采样回波信号,场景中的静止目标存在Doppler谱模糊,而运动目标则存在Doppler中心频率模糊和Doppler谱模糊.杂波相消获得稀疏运动目标信号是后续信号处理得以进行的关键步骤.然而传统的基于图像域杂波相消的方法在低采样系统中是不可行的,主要原因就是模糊数据成像得到的SAR图像是完全模糊的,实际场景中的一个散射点在图像域中会出现多个模糊点,无法分辨真实目标和模糊目标,因而无法进行参数估计.针对该问题,本文提出在距离压缩后的数据域进行杂波相消以此获得稀疏信号.采用双通道DPCA在距离压缩数据域进行杂波相消,杂波相消后的表达式为N·µ¶¸·¸µ¶X0t^¡2Rn(tm)(va¡vxn)tm¡xn¡j4¼Rn(tm)s(t;t^m)=AnsincBrectexp;(5)cLa¸n=1其中:A0=2jexp(j2¼v¢t=¸)sin(2¼v¢t=¸)A,¢t=d=(2v),j2=¡1,d表示通道间距.式(5)中nynynna的sinc函数为运动目标包络的距离徙动项,它包括线性分量(占距离徙动的主要部分)和二次分量,通过近似地补偿包络中的二次分量,以及利用能量平衡方法[12]粗略地获得目标方位信息近似地补偿掉由其引起的线性分量,式(5)可以改写为N·µ¶¸·¸X0t^¡2(va¡vxn)tm¡xns(t;t^m)¼AnsincB(Rn¡vyntm)rectcLan=1µµ¶¶4¼((v¡v)t¡x)2axnmn¢exp¡jRn¡vyntm+;(6)¸2Rn从式(6)可以看出,运动目标的包络走动量与垂直航向速度有关.为了对方位能量进行有效积累,首先需要校正运动目标的包络走动.3基于Keystone变换的稀疏走动校正Keystone变换[13]可以对运动状态未知的多个运动目标信号同时进行距离徙动校正,但Keystone变换仅能在Doppler频谱不混叠的情况下校正基带Doppler偏移对应的速度分量引起的距离走动.为1519\n刘燕等:低重频采样SAR系统中地面运动目标参数估计此,本文首先对进行了杂波抑制的距离脉压信号进行方位dechirp,去除雷达运动引起的方位Doppler带宽,此操作极大地降低了Doppler频谱混叠的概率.接着用Keystone变换的方法校正基带Doppler偏移对应的速度分量引起的距离走动,将运动目标的包络固定在几个相对离散的斜率上,然后采用稀疏走动校正滤波器组完成剩余走动量校正.具体方法如下:(1)方位dechirp处理.本文通过方位dechirp[14]去除雷达运动产生的方位调频率,用来进行方位dechirp的参考函数为µ¶2¼v2t2amsref1(tm)=expjfc:(7)cRs将式(7)所示的参考函数与式(6)所示信号相乘,方位dechirp处理后,第n个动目标信号可以表示为s(t;t^m)=s(t;t^m)sref1(tm)·µ¶¸·¸00t^¡2(va¡vxn)tm¡xn=AnsincB(Rn¡vyntm)rectcLaµµ¶¶µµ¶¶4¼(v¡v)2v24¼(v¡v)¢exp¡jax¡at2expjv+axxt(8)ynn¸2Rn2Rs¸Rn2其中:A00=A0exp(¡j4¼(R+xn)).为了表述的简洁,以下将统一用a来表示同成像无关复系数.nn¸nRnn由于目标方位速度一般远小于雷达速度,在方位dechirp之后,目标的Doppler带宽相比未进行方位dechirp的Doppler带宽要小很多.方位dechirp处理极大地降低了Doppler谱混叠的概率.(2)Keystone变换.距离脉压后的信号在距离频域可以表示为·¸·¸µ¶fr(va¡vxn)tm¡xn4¼S(fr;tm)=anrectrectexp¡jfr(Rn¡vyntm)BLacµµ¶¶µµ¶¶4¼(v¡v)2v24¼(v¡v)¢exp¡jax¡at2expjv+axxt;(9)ynn¸2Rn2Rs¸Rn其中fr表示距离向频率.如第2节所述,目标的垂直航向速度会引起Doppler中心频率的模糊.为了算法推导的方便,本文将目标的垂直航向速度表示为v=v0+Mv;(10)ynyny0其中:v=cPRF=(2(f+f))对应于Doppler中心偏移为PRF时所对应的垂直航向速度,v0=y0crynvyn(mod(vy0))表示引起的Doppler偏移在(¡PRF/2,PRF/2)范围内所对应的速度分量(也称为基带垂直航向速度分量),M表示Doppler中心频率模糊数(也称为垂直航向速度模糊数).对基带Doppler偏移对应的速度分量v0引起的走动,可采用Keystone变换对其进行校正,采用ynKeystone变换对方位dechirp后的信号进行处理.Keystone变换为(fc+fr)tmt=;(11)fc信号在距离频域可以近似表示为·¸·¸µ¶fr(va¡vxn)tm¡xn4¼S(fr;tm)=anrectrectexp¡jfr(Rn¡Mvy0tm)BLac1520\n中国科学:信息科学第41卷第12期µµ¶¶µµ¶¶4¼(v¡v)2v24¼(v¡v)¢exp¡jax¡at2expjv+axxt:(12)ynn¸2Rn2Rs¸Rn对Keystone变换后的信号进行距离反Fourier变换可以得到·µ¶¸·¸µ¶t^¡2(va¡vxn)tm¡xn4¼S(t;t^)¼ansincB(Rn¡Mvy0t)rectexp¡jRncLa¸µµ¶¶µµ¶¶4¼(v¡v)2v24¼(v¡v)¢exp¡jax¡at2expjv+axxt:(13)ynn¸2Rn2Rs¸Rn从式(13)可以看出,Keystone变换消除了包络的非周期走动部分,此时信号的包络只与速度的模糊周期数有关系.(3)稀疏走动校正.为了简单起见,将式(13)改写为·µ¶¸·¸µ¶t^¡2(va¡vxn)tm¡xn4¼s(t;t^)=ansincB(Rn¡Mvy0t)rectexp¡jRncLa¸¢exp(j¼°t2)exp(j2¼ft);(14)andn2v2其中:°=¡2((va¡vx)¡a)表示方位dechirp处理后信号的残余方位向调频率,f=2(v0+an¸RnRsdn¸yn(va¡vx)Mvy0+Rxn)表示方位dechirp处理后信号的Doppler中心频率.n构造稀疏走动校正的距离频域滤波函数µ¶4¼Hm(fr;t)=expjfrmvy0t;m2[¡Mmax;Mmax];(15)cm为滤波器组的编号.对Keystone变换后的信号进行稀疏走动校正,得到sm(t;t^)=IFT[Sn(fr;t)Hm(fr;t)]·µ¶¸·¸t^¡2(va¡vxn)t¡xn=ansincB(Rn¡(M¡m)v0t)rectcLaµ¶4¼2¢exp¡jRnexp(j¼°ant)exp(j2¼fdnt);(16)¸其中,IFT[¢]表示逆Fourier变换.对应于Rn处的距离单元的动目标方位信号可以表示为·¸µ¶(va¡vxn)t¡xn4¼2sm(t)=anGM¡m(t)rectexp¡jRnexp(j¼°ant)exp(j2¼fdnt);(17)La¸其中:GM¡m(t)为窗函数,当m=M时,G0(t)表示的时窗最长,表示包络完全矫平.当m6=M时,包络没有完全被矫平,信号在方位上等效于加了一个窗.Keystone变换后的数据通过滤波器组,各个动目标的包络会在与其速度模糊数相对应的滤波器中矫成直线.若对滤波器输出信号进行方位Fourier变换,那么在走动被完全校正的情况下,沿航向速度为零的目标聚焦到一个分辨单元,且其峰值能量最大;沿航向速度不为零的目标被部分聚焦.联合各个通道的数据,采用恒虚警检测技术检测出目标速度模糊数,同时也完成了包络的距离走动校正.1521\n刘燕等:低重频采样SAR系统中地面运动目标参数估计4基于压缩感知理论的参数估计方法首先简要介绍压缩感知理论.压缩感知理论[15¡17]主要用于具有一定稀疏度(sparsety)的信号恢复[15].假设y2CM表示长度为M的向量,信号y可以用一个基线性表示y=©a,©=fÁ1;Á2;:::;ÁMg表示冗余基,a为系数向量,若a的大部分元素是零或近似为零,只有N个元素绝对值远大于零,称该信号稀疏度为N.对信号y进行观测得到s=Ãy,Ã2CK£M(K
Nlog(M=N)时,我们通过解下列的优化方程,可以将长度为N的系数向量从长度为K的观测数据s中完全重构.min(kak1);且s=éa;(18)其中k¢kp表示p范数,min(¢)表示最小化.下面需要解决的问题是:如何获取运动目标沿航向速度、垂直航向速度以及方位位置信息.针对这一问题,我们提出利用CS信号重建理论恢复稀疏运动目标信息同时获取它们的运动参数.根据式(14),距离徙动校正后的方位信号可表示为N·¸Xv¹nt¡xn2s(t)=anrectexp(j¼°ant)exp(j2¼fdnt);(19)Lan=1其中:N为距离单元内的点目标个数,¹vn=va¡vxn.根据理论介绍,利用CS理论进行运动目标方位成像需要构建一个冗余基©.由于信号的观测方式(观测矩阵)已知,可直接将é做为一个整体并用Á来表示.根据式(19),Á的列向量Ái;l;p可以写为·¸v¹lt¡xi2Ái;l;p=rectexp(j¼°alt)exp(j2¼fdpt);(20)La其中:t表示慢时间序列,xi为场景中方位向搜索位置,i=1;2;:::;I;I为搜索个数;°al为方位向残余调频率的搜索值,l=1;2;:::;L;L为搜索个数;fdp为基带Doppler中心频率的搜索值,p=1;2;:::;P;P为搜索个数(由于exp(jx)是以2¼为周期的函数,本文仅搜索(¡PRF/2,PRF/2)以内的值).式(19)可以用矩阵相乘的形式表示:s(t)=Áa;(21)其中,a2CILP£1为运动目标散射系数向量.通过上述构造向量a中只有N个非零元素对应了场景中的N个运动目标.考虑到杂波相消时由于存在通道不一致及热噪声影响会引入以下加性噪声,式(21)改写为s(t^;t)=Áa+±(t);(22)其中,±(t)表示加性噪声.利用凸优化[18]或者贪婪算法[19]解下列优化方程,min(kak1);subjecttoks(t^;t)¡Áak26»;(23)其中,»为误差水平.通过解优化方程可以获得向量a实现稀疏信号重建.这里需要说明的是,由于存在噪声影响,获得的向量a中并不是只有N个非零元素,而是有N个大系数元素,它们对应了场景中的N个运动目标.CS优化处理方法获得了运动目标的方位位置x^n,残余方位Doppler调频率°^an1522\n中国科学:信息科学第41卷第12期图2算法流程图Figure2Blockdiagramoftheproposedalgorithm以及模糊后的基带Doppler中心频率f^dn,n=1;2;:::;N.根据式(14),可以根据估计出的残余方位Doppler调频率°^an计算出目标的沿航向速度sµ¶v2cavxn=va¡Rn¡°^an:(24)Rs2fc通过式(14)所示的方位位置、目标的垂直航向速度以及Doppler中心频率之间关系,可以根据估计出的x^n和f^dn,并结合估计出的速度模糊数计算出目标的垂直航向速度.图2给出了该算法的流程图.5实验结果5.1仿真数据这一小节我们通过仿真实验验证本文方法的有效性.首先给出一组星载仿真参数,发射信号载频为10GHz,带宽为50MHz,采样频率为60MHz,方位孔径长度为6m,雷达平台速度为7200m/s,平台高度为700km,入射角为45±,脉冲重复频率PRF=480Hz,仿真实验中我们采用双通道DPCA模式进行杂波相消,双通道的间距为15m.通过上述给出的雷达参数可以计算出方位Doppler谱宽度为2400Hz,而方位采样频率仅为Doppler谱宽的1/5,因而会导致Doppler谱模糊5次.假设场景中有2个运动目标分别为P1,P2,它们的距离和方位位置参数分别为(0,18),(¡160,598),单位为m,它们垂直航向速度和沿航向速度分别为(30,10.2),(¡43.5,8.5),单位为m/s.图3给出了模糊数据成像示意图,从图中可以看出基于图像域的参数估计是行不通的,因为低PRF导致了Doppler谱模糊使场景中某一目标对应图像域的多个点,我们无法分辨真实目标和模糊目标,因而无法进行后续的参数估计.图4给出了在距离压缩数据域进行DPCA杂波相消图,从图4可以看出,由于目标垂直航向的运动引起了目标包络的走动;图5给出了稀疏走动校正滤波器组输出结果图,可以1523\n刘燕等:低重频采样SAR系统中地面运动目标参数估计图3模糊数据成像图4距离压缩数据域杂波相消图Figure3AmbiguousdataimagingFigure4ResultofrangecompressionafterDPCA图5稀疏走动校正滤波器组输出结果图Figure5Theresultofthesparserange-walkcorrection¯lter(a)Theoutputof¯lter4;(b)theoutputof¯lter¡6看出,目标P1的包络走动在通过序号为4的滤波器后被完全校正,目标P2的包络走动在通过序号为¡6的滤波器后被完全校正.图6(a)和(c)给出了运动目标P1和P2通过CS优化处理后的结果图,图6(b)和(d)给出了本文方法估计的运动参数结果图,图中目标的方位位置和沿航向速度是通过本文第4部分所述的CS方法估计得到;垂直航向速度的模糊数是通过本文基于Keystone变换的稀疏走动校正方法估计得到,其基带速度通过基于CS理论的优化处理结果得到.仿真实验验证了本文方法能够准确估计低PRF采样系统中目标的运动参数.5.2实测数据这一节我们利用实测数据进一步验证本文方法,雷达工作参数如下:雷达载频为8850MHz,发射带宽为40MHz,方位孔径长度为0.551m,雷达平台速度为111.1m/s,脉冲重复频率PRF为1000Hz.双通道间距为0.559m.通过计算可以得知:PRF大于Doppler谱宽度,同时双通道间距不满足DPCA条件.我们采用下面的方法对实测数据进行预处理,使其满足本文的要求.首先将双通道数据转化至1524\n中国科学:信息科学第41卷第12期图6基于CS理论的运动参数估计结果图Figure6Estimationofmotionparametersbasedontheproposedmethod(a),(c)SearchresultsofP1andP2byoptimizationprocessing;(b),(d)theestimatedpositionsandvelocitiesforP1andP2图7原始数据与模糊数据Figure7Contrastbetweenunambiguousimageandambiguousimage(a)Imagingforrealdata;(b)ambiguousdataimagingDoppler域,再给数据乘以由通道位置引起的线性相位,然后再将数据转化到慢时间域,此时获得的数据就可以用于验证本文的方法.对双通道预处理后的数据进行均匀抽取,每20列抽取1列,相当于将PRF降低20倍,此时获取的数据是完全模糊的,图7(a),(b)分别给出了原始数据和抽样后的模糊数据成像示意图.图8中,(a),(c),(e)和(g)给出了不同目标基于CS理论的优化处理的结果图,图8(b),(d),1525\n刘燕等:低重频采样SAR系统中地面运动目标参数估计图8基于CS理论的运动参数估计结果图Figure8Estimationofmotionparametersbasedontheproposedmethod(a)(c)(e)(g)SearchresultofTarget1,Target2,Target3andTarget4byoptimizationprocessing;(b)(d)(f)(h)theestimatedpositionsandvelocitiesforTarget1,Target2,Target3andTarget41526\n中国科学:信息科学第41卷第12期(f)和(h)给出了不同运动目标的运动参数估计结果.实测数据通过优化处理后,其输出结果中大系数代表着运动目标,而非零小系数可能由两部分原因造成,一是噪声误差,另一方面可能是在实测数据处理中基矩阵构造的不完备.6结论本文提出一种基于压缩感知理论对低重频SAR系统中的运动目标参数估计的新方法.首先分析了SAR系统低PRF采样会导致Doppler中心频率模糊和Doppler谱混叠,利用RCM与Doppler模糊无关这一重要性质,提出基于Keystone变换的稀疏走动校正获得运动目标垂直航向速度的模糊数以及距离位置.考虑到实际场景中运动目标是稀疏分布的,通过杂波相消后运动目标可以看作是空间稀疏信号,本文利用CS理论进行方位信号重建,从而获得运动目标运动参数.最后通过仿真数据和实测数据进一步验证该方法的正确性.参考文献1CurrieA,BrownMA.Wide-swathSAR.IEEEProcRadarSonarNavig,1992,139:122{1352CallaghanGD,Longsta®ID.Wide-swathspace-borneSARandrangeambiguity.In:ProceedingsofRadar97.Edinburgh,1997.248{2523CallaghanGD,Longsta®ID.Wide-swathspace-borneSARusingaquad-elementarray.IEEEProcRadarSonarNavig,1999,146:159{1654LiZF,WangHY,SuT,etal.Generationofwide-swathandhighresolutionSARimagesfrommultichannelsmallspaceborneSARsystem.IEEEGRSLett,2005,2:82{865KriegerG,GebertN,MoreiraA.Multidimensionalwaveformencodingforspacebornesyntheticapertureradarsystems.In:ProceedingsoftheIEEEWaveformDiversity&DesignConference.PISA,2007.282{2866KriegerG,GebertN,MoreiraA.Multidimensionalwaveformencoding:anewdigitalbeamformingtechniqueforsyntheticapertureradarremotesensing.IEEETransGRS,2008,46:32{427KriegerG,GebertN,MoreiraA.UnambiguousSARsignalreconstructionfromnonuniformdisplacedphasecentersampling.IEEEGRSLett,2004,1:260{2648MarquesP,DiasJ.MovingtargettrajectoryestimationinSARspatialdomainusingasinglesensor.IEEETransAerospElectrSys,2007,43:864{8749MarquesP,DiasJ.VelocityestimationoffastmovingtargetsusingasingleSARsensor.IEEETransAerospElectrSys,2005,41:75{8910ZhangXD,BaoZ.NonstationarySingalProcessing.Beijing:NationalDefenseIndustriesPress,1998[张贤达,保铮.非平稳信号处理.北京:国防工业出版社,1998]11LiZF,BaoZ,WangT.GroundmovingtargetindicationfordistributedsmallsatelliteSARsystems.ActaElectronSin,2005,33:1664{1666[李真芳,保铮,王彤.分布式小卫星SAR系统地面运动目标检测.电子学报,2005,33:1664{1666]12LiFK,HeldDN,CurlanderTL,etal.Dopplerparameterextimationforspacebornesyntheticapertureradar.IEEETransGeoRemoteSens,1985,23:47{5613PerryRP,DiPietroRC,FanteRL.SARimagingofmovingtargets.IEEETransAerospElectrSys,1999,35:188{20014CummingIG,WongFH.DigitalProcessingofSyntheticApertureRadarData:AlgorithmsandImplementation.NorwoodMA:ArtechHouse,200515Cand¶esE,RombergJ,Tao,T.Near-optimalsignalrecoveryfromrandomprojections:universalencodingstrategies.IEEETransInfTheor,200652:489{50916DonohoD.Compressedsensing.IEEETransInfTheor,2006,52:5406{542517HermanM,StrohmerT.CompressedSensingRadar.In:ProceedingsoftheIEEERadarConference,2008.26{301527\n刘燕等:低重频采样SAR系统中地面运动目标参数估计18GrantM,BoydS,YeY.CVX:MatlabSoftwareforDisciplinedConvexProgramming.Http://www.stanford.edu/»boyd/cvx/19Rebollo-NeiraL,LoweD.Optimizedorthogonalmatchingpursuitapproach.IEEESignProcessLett,2002,9:137{140ParameterestimationofmovingtargetsintheSARsystemwithalowPRFsamplingrateLIUYan¤,WUQiSong,SUNGuangCai,XINGMengDao,LIUBaoChang&BAOZhengKeyLaboratoryforRadarSignalProcessing,XidianUniversity,Xi'an710071,China*E-mail:liuyan1028@163.comAbstractInthesyntheticapertureradar(SAR)systemwithlowpulserepetitionfrequency(PRF)sampling,itisdi±cultforthemotionparametersestimationofthemovingtargets,becauseoftheDopplerspectrumambiguityandDopplercentroidfrequencyambiguityoftheechosignals.Consideringthatmovingtargetsaresparselydistributedintheobservedscene,theirpositionsandvelocitiescanbereconstructedbyusingthecompressedsensing(CS)technique.Inthispaper,therange-walkcorrectionareimplementedbytheKeystonetransformandtheSparseRange-WalkCorrection(SRWC),thentheCStechniqueisproposedtoreconstructmotionparametersbyprocessingtheazimuthsignalsofthemovingtargetsExperimentsusingthesimulatedandrealdataareperformed,andtheresultscon¯rmthevalidityoftheproposedmethod.Keywordssyntheticapertureradar(SAR),movingtarget,motionparameterestimation,Keystonetransform,range-walkcorrection,compressedsensing(CS)1528