- 2022-09-27 发布 |
- 37.5 KB |
- 3页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
并联三自由度运动平台动力学分析
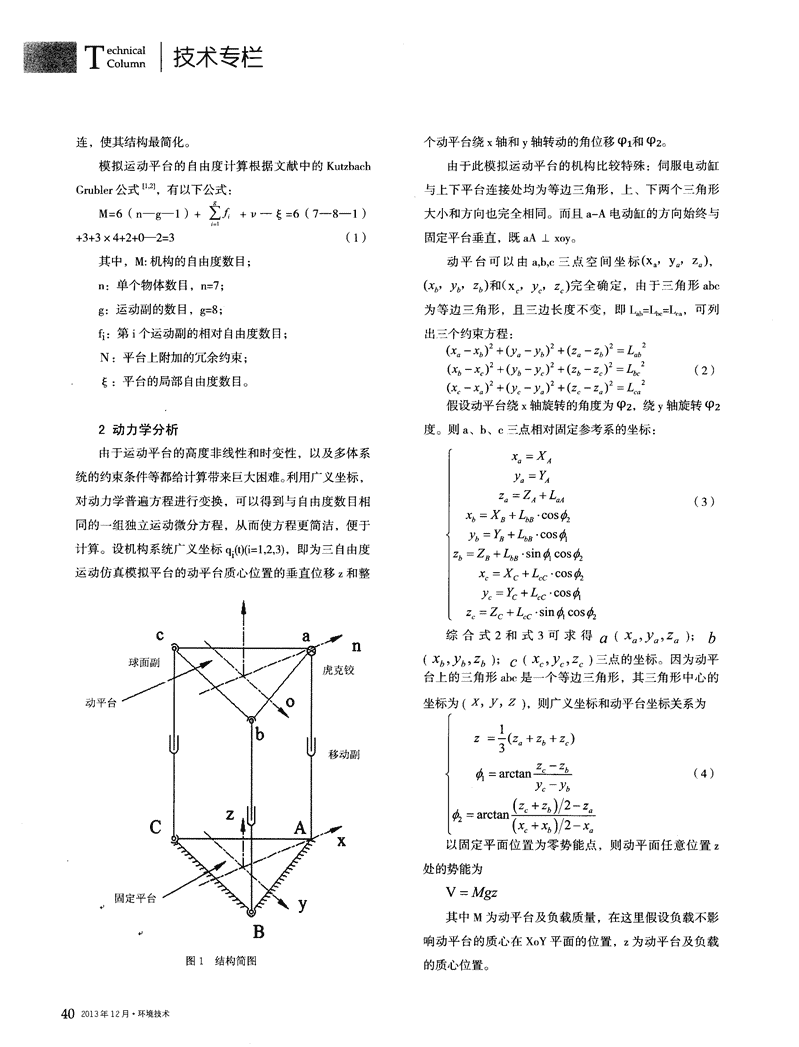
rI_1echnical1Co1umnl技术专栏—■并联三自由度运动平台动力学分析付景顺,郎晓辉,张弘(1.沈阳工业大学,沈阳110870;2.沈阳装备制造学校,沈阳110026)摘要:本文由三自由度并联机构的结构入手,介绍了一种一平移两转动的三自由度运动模拟平台,此平台通过改变三个可伸缩的支撑杆的长度来实现模拟平台的特定位姿。应用拉格朗日方程建立动力学模型,分析了机构的结构参数与驱动力的关系,为机械结构设计提供了依据。关键词:三自由度;并联机构;动力学分析中图分类号:TH113文献标识码:A文章编号:1004—7204(2013)06—0039—03DynamicAnalysisofa3-DOFParallelPlatformFUJing—shun,LANGXiao—hui,ZHANGHong(i.ShenyangUniversityofTechnology,Shenyang110870:2.ShenyangEquipmentManufacturingSchool,Shenyang110026)Abstract:Fromthestructureofthreedegreesoffreedomparalle1mechanism,athreedegreesoffreedommotionSimulationplatformwithonetrans1ationalandtworotationaliSanalyzedinthiSpaper.ThiSplatformsimplifiesthestructurebychangingthelengthofthethreecollapsiblesupportrodstoachieveaspecificpositionandorientationofthesimulationplatform.BasedonLagrange’Sequation,thedynamicmodelofthe3-DOFparallelplatformwasestablished.Therelationbetweensystemparametersanddriveforceofthemechanismwasobtained,thusprovidesbasiSforthemechanicalstructuraldesign.Keywords:threedegreesoffreedom:parallelmechanism:dynamicanalysiS引言1运动平台自由度的计算并联三自由度运动模拟平台广泛应用于仿真领域,并联三自由度运动平台,其结构简图如图1所示。能够模拟多种现实中的两转动一平移的三自由度娱乐项该机构上下平台支点连接起来后是两个全等的等边三角目]。由此运动平台配合预设的虚拟动画及软件功效,形abe和ABC,三条边的长度均为600mm,上、下平台能够使游戏者体验到身临其境、惊险刺激的动感特效,之间用3根可伸缩的量程为400mm的电动缸相联,即例如4D影院座椅和娱乐赛马等。其运动关节少,性价LA=LbB=Lc=600mm。a—A电动缸与上平台之间用虎比高。目前国内已有一些运动平台,承载能力小,结构克铰相连,另外两个电动缸与上C两点为平台都用圆柱较为复杂p】。本文根据某模拟平台的性能要求简化了结式球铰连接。即a点为虎克铰,b和c两点为2个圆柱构,着重从三自由度平台的动力学分析,并以此作为电式球铰。而下平台B、c两点与电动缸之间同样用圆柱动缸驱动电机的选型依据。式球铰相联。A点将电动缸与下平台之间用固定螺栓相基金项目:辽宁省教育厅科研项目(201114126)EnvironmentalTechnology·December201339\n连,使其结构最简化。个动平台绕X轴和Y轴转动的角位移qol和cP2。模拟运动平台的自由度计算根据文献中的Kutzbach由于此模拟运动平台的机构比较特殊:伺服电动缸Grubler公式[1,21,有以下公式:与上下平台连接处均为等边三角形,上、下两个j三角形M:6(n—g一1)+∑+v一∈=6(7—8—1)大小和方向也完全相同。而且a—A电动缸的方向始终与=1+3+3×4+2+0--2:3(1)固定平台垂直,既aAj_xoy。其中,M:机构的自由度数目;动平台可以由a,b,c三点空间坐标(X,Y。,Z),n:单个物体数目,n:7;(%,,Zb)和(x,Y,Zc)完全确定,由于三角形abcg:运动副的数目,g=8;为等边三角形,且三边长度不变,即=Lh=Lo,可列fi:第i个运动副的相对自由度数目;出三个约束方程:(一%)+(J,一6)+(Z一Zb)=L曲N:平台上附加的冗余约束;(Xb—xc)+(Yb—yc)+(z6一Zc)=Lbc‘(2)∈:平台的局部自由度数目。(—)+(Y一。)+(Z一Za)=L‘假设动平台绕X轴旋转的角度为(p2,绕Y轴旋转(p22动力学分析度。则a、b、ei点相对固定参考系的坐标:由于运动平台的高度非线性和时变性,以及多体系xa=XA统的约束条件等都给计算带来巨大困难。利用广义坐标,=z:Z+f3)对动力学普遍方程进行变换,可以得到与自由度数目相Xb=XB+LbB‘cos~b2同的一组独立运动微分方程,从而使方程更简洁,便于Yb=+‘cos0,计算。设机构系统广义坐标qi(1)(1,2,3),即为三自由度Zb=ZB+Lb·sincos~2运动仿真模拟平台的动平台质心位置的垂直位移z和整Xc=+Lcc·COS欢=+Lc’cosZc=Zc+c·sin~,cos~~2综合式2和式3可求得a(X,Y,Z);b,n(,Y6,Z6);C(Xc,Y,Z)三点的坐标。因为动平虎克铰台上的三角形abc是一个等边三角形,其三角形中心的动平坐标为(,Y,Z),则广义坐标和动平台坐标关系为1(+z:z6+z)j移动副=arctan(4)yc—yb一,X以固定平面位置为零势能点,则动平面任意位置z处的势能为V=Mgz其中M为动平台及负载质量,在这里假设负载不影B响动平台的质心在XoY平面的位置,z为动平台及负载图1结构简图的质心位置。402013年12月·环境技术\n1I-1eCcoh1nuimcan1I技术专栏系统的动能可用以下公式算得:了动力学建模,得到了运动平台的速度以及加速度等一T=Mk+圭2+2系列动力学公式,为后期机械结构设计及电动缸选型等I为动平台绕x轴的转动惯量,I为动平台绕Y轴提供了理论依据。的转动惯量。故系统的动势为L:T—V:1Mk2lI&+一1I22一Mgz+x222y式中:L为拉格朗日函数;T为系统动能;V为系统势能。代入到拉格朗日方程d/aL、aL五(一瓦Q,|『l式中:q为广义坐标;Qi为广义力。得到以下三式:d/OL'~aLI广Fzd,【aL、J一aLM1d/aL、aL五【J一M2得到:M一g)=FIx币1=M1Ix币2=M2动平台竖直速度=f(F(t)/M—g)dt动平台绕x轴的角速度=I((0/I)动平台绕y轴的角速度(-02=f((t)/I)参考文献式中:)为三个电动缸在a,b,c三点对动平台作[.】黄真,孔令富并联机器人机构学理论及控制[M】.北京:机械工业出用力在质心的合力;Mt)为绕x轴的转矩;O)为版社,1997.【2]SaeedB.Niku.IntroductiontoRobotics:Analysis.Systems,绕Y轴的转矩。由此角加速度币1和币2也就得到了。Applications[M】PrenticeHal,2001,7.根据并联三自由度运动平台系统的机械结构以及技【3】刘宏伟,马质璞.3一PRS并联机构运动分析及仿真【J].机械设计与制造,201I,3.术指标要求:【4】李绍安某型战机飞行模拟器三自由度运动平台的研制【D1华中科技三根电动缸总体承受载荷W=1000kg。大学硕士学位论文,2005,5【5]自志富,韩先国,陈五一.基于Lagrange方程三自由度并联机构动最大瞬时垂直线加速度a=0.5g。力学研究北京航空航天大学学报,2004,1平台最大载荷为:[6】薛定宇,陈阳泉.基于MATLAB、Simulink的系统仿真技术与应用【M】北京:清华大学出版社,2002,3=W(g+a)=1000X(1+0.5)=15000(N)作者简介3结论付景顺(I963一),男,沈阳工业大学机械工程学院教授、车辆对一种并联三自由度运动模拟平台简化结构,使其工程系主任,工学博士。运动副少,结构精简,性价比高。用拉格朗日方程进行EnvironmentalTechnology‘December201341查看更多