- 2022-09-27 发布 |
- 37.5 KB |
- 8页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
用相对运动图解法作机构的运动分析
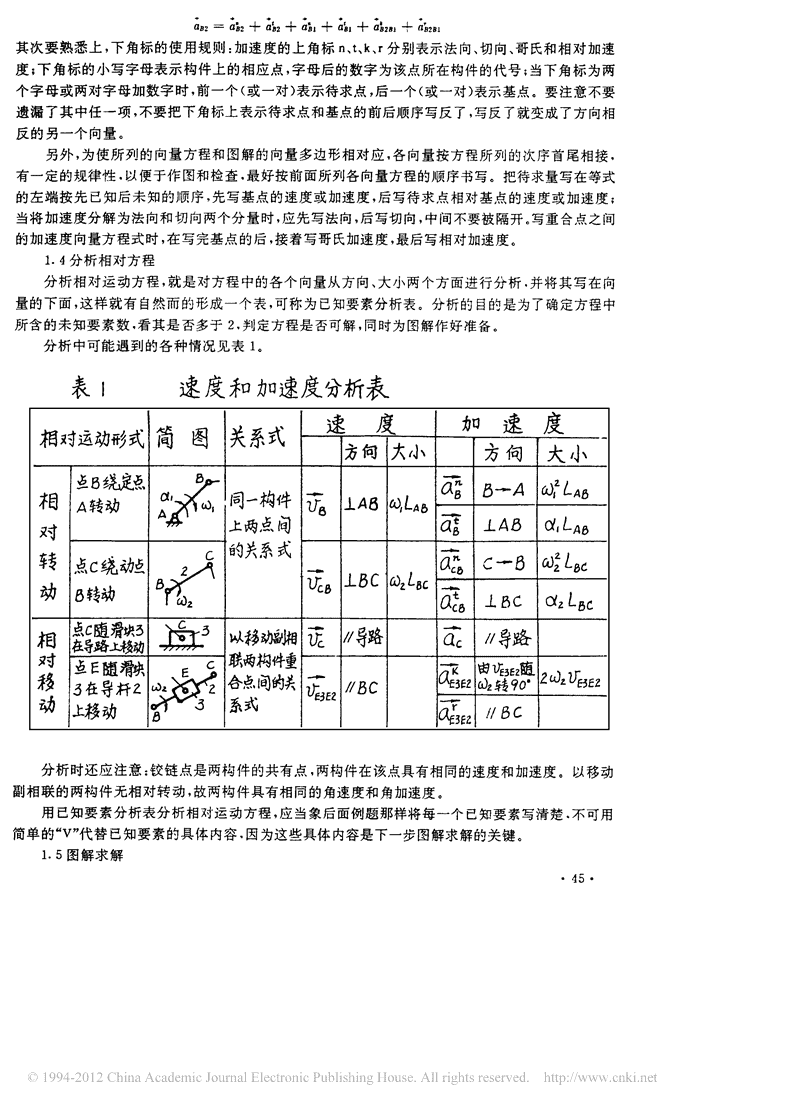
1995年宝鸡文理学院学报(自然科学版)1995ournao.第1期Jlf加娜C叭e助of^r一5andien(Naturalience)NolSC粥Sc¹用相对运动图解法作机构的运动分析陈光荣(机械来)摘要,本文就用相对运动图解法作平面机构运动分析中涉及到的主要问题加以讨论并揭力闲明其中一些规律性的东西。:相对运动、、、关键词图解法速度加速度1解题步骤及注意事项1.1按题给条件准确画出机构位置图,机构位置图是图解的基础构件上点的速度和加速度(或其分量)的方向与机构位置图中的相.,图解所得的速度多边形和加速度多边形会出现偏应线段不是平行就是垂直机构位置图不准确差,解题不可能得到较精确的结果。.12选待求点.确定解题顺序、,,基点运动分析曾是由已知到未知先速度分析后加速度分析(又称牵连点)应是运动已知的,,。,点待求点是未知点但不一定就是题目要求的点基点和待求点的选择是否合适关系到建立的相对运动方程是否可解.以及解题的繁简问题。,见后面问题讨论2.1。此步骤可以写其中有规律可循出来.也可以不写出,但必须胸中有数,这样才不致于走弯路。1.3建立相对运动方程建立相对运动方程首先要分清两种情况,选用相应的关系式。(1)同一构件上两点(C和B)的速度和加速度向量方程式vcv:vcs~+a。~ar.a。‘=aa,a。‘ae,‘a:+++一仑,Z:(2)两构件以移动副相联时瞬时重合点(B和B)间的速度和加速度向量方程式Z。a,vaZ:,va=+¹本文1994年10月31日收到·44·\naa:a忘:a:a:a:aZa,aZa,=十‘+去+乞+急十公,:n、、、r、、其次要熟悉上下角标的使用规则加速度的上角标tk分别表示法向切向哥氏和相对加速,;;度下角标的小写字母表示构件上的相应点字母后的数字为该点所在构件的代号当下角标为两,,。个字母或两对字母加数字时前一个(或一对)表示待求点后一个(或一对)表示基点要注意不要,,遗漏了其中任一项不要把下角标上表示待求点和基点的前后顺序写反了写反了就变成了方向相反的另一个向量。,,,另外为使所列的向量方程和图解的向量多边形相对应各向量按方程所列的次序首尾相接,,。有一定的规律性以便于作图和检查最好按前面所列各向量方程的顺序书写把待求量写在等式,,后写待求点;的左端按先已知后未知的顺序先写基点的速度或加速度相对基点的速度或加速度,,,。当将加速度分解为法向和切向两个分量时应先写法向后写切向中间不要被隔开写重合点之间,,,。的加速度向量方程式时在写完基点的后接着写哥氏加速度最后写相对加速度1.4分析相对方程分析相对运动方程,就是对方程中的各个向量从方向、大小两个方面进行分析.并将其写在向,,。量的下面这样就有自然而的形成一个表可称为已知要素分析表分析的目的是为了确定方程中,,,。所含的未知要素数看其是否多于2判定方程是否可解同时为图解作好准备分析中可能遇到的各种情况见表1。表}速度和加速度分析表,柏寸运动形式简图关系式速度加速度方伺大小方伺大小6要一IA6叭L,。·乃一,。才目鱼扮挽扮同构件魂瘫A礴乙:又寸A转动。上两点{司一上A乃叹.oa车专护的关系式节L认B动cC。上乃C叭‘乙。、之I点绕动点吕说场甘从.‘乃一6四2‘SC已车专动.电闷巨卜上6C以:oen七L澎‘六CS‘C,拍’点c随户滑块弓J’琳移劝副湘’/刀导路夕寸在导路啾功卖江联两构件重正导路砚鱼巨随滑虫:2/乃C。:由雀3E2之::动系式随晓呢移乃在导杆之合点间的关范恋晓转甲0’上移动月竺/吕C声岁丫3行乙:,两。分析时还应注意铰链点是两构件的共有点构件在该点具有相同的速度和加速度以移动,。副相联的两构件无相对转动故两构件具有相同的角速度和角加速度,,用已知要素分析表分析相对运动方程应当象后面例题那样将每一个已知要素写清楚不可用“”,。简单的v代替已知要素的具体内容因为这些具体内容是下一步图解求解的关键1.5图解求解\n用图解法求解相对运动方程的基本方法就是向量多边形法。若选取相应的比例尺.任何一个向,。量方程都可以用一个向量多边形来表示这个向量多边形的边数就等于向量方程式中向量的个数,,在向量多边形中前一个分向量的矢端就是后一个分向量的起点而由第一个分向量的起点到最后,。、一个分向量的矢端的向量就是各分向量的合向量由于只要合向量和分向量的未知要素(方向大,,。小)数不大于2该向量多边形仍可作出因此用图解法可解含有两个未知要素的向量方程作图前,,,先要将各已知向量的大小算出并除以相应的比例尺计算出各已知向量的图示长度然后按向量方程及各向量的方向和图示长度准确作图.,,,要图解求解还须熟悉速度多边形和加速度多边形的特性这在教材中已有详述这里不再赘述。2问题讨论2.1如何选待求点,确定解题顺序及方法,,,图2一la为铰链四杆机构欲求E点的速度议若直接以E点为待求点以已知点B为基点建立速度方程式v:=v,+vrB方向?上AB土BE」^,大小?。L?,。因有三个未知要素该方程不可解,,若先以C点为待求点仍以B点为基点,,则有瓦一丢+乱方向土CD土AB上BC。,^a大小?L由该方程式可作出速度多边形护,b,。(图2一lb),可求出vc。再以E点为待求占.B、c两点为基点建立联立方程。v:v,,vcv,c一+v’十书方向土AB土BE土CDICE。』^:uo大小L?pb?,·。作速度多边形pb。。(图2一lb)则*二、pep指向。议的方向为由,,若求出。点的速度后用速度影像法以速度多边形pb。中的b。为一边作bce一Bce具:,,e。ee。,体作法为作bo一BEce土cE则b和的交点即为点(见图2一lb)显然这样不建立联,.立方程也可作出速度多边形pbec从而方便地求出E点的速度a,,3,再看图2一Z所示的摆块机构欲求构件3上D点的速度说需求也构件3的角速度。因。3,Z,:Z吻一可以构件2上的c点为待求点这时单独利用生命点c和同一构件上的点B作为基点都不能求解,需列出联立方程式:,Ze,2迄比十几几+刁半!lp户{An!及户白曰、目~、户一占J、“/JrJ!{”上厂‘目月.目.户.‘目叫户一--O?I^.。LZcZ。u,。:,。·,可作出速度多边形pb如图2一2b所示则。2一户/L‘方向顺时针场~听方向直于场·46·\n。CD指向右自pb3b)“一‘“一之图图Z,若选与构件3以移动副相联的构件2上的已知点B为基点将构件3扩大(如图2一2a所,Z3,示)取构件3上B点的重合点B为待求点则有速度向量方程式,va:vs3aZva一+ABBC方向土BC土。J^:大小?L?3Z:3图解关系式pb=pb=bbZ,,,3作速度多边形pbb如图2一2b所示这时因构件3上有两点B和c的速度已知(*一0与速度,,,。p可用速度影像法求a点则、一、显然这比前一种解法多边形中点相对应)而方向与面相同简便.但要用到构件扩大的概念.:由上面两例分析可以得也以下结论。(1)基点应选运动已知的铰链点,.(2)利用同一构件上两点间的关系式时待求点应选与基点在同一构件上的另一铰链点,,.(3)非铰链点的运动既可用联立方程求解也可以用影像法求解但用影像法更为简便,,,(4)当机构中有移动副时解题要用重合点间的关系式待求点应选基点的重合点当该点不在,。,.该构件的图示范围内时可将构件扩大上述结论是由速度分析得出的但也适合于加速度分析须,,注意的是加速度影像的作图不象速度影像那样简单要用相似三角形的作图法并要注意两相似图,.形的字母绕行顺序相同即按同一顺序同为顺时针或逆时针2.2机构处于特殊位置时的运动分析,,当机构使人处于特殊位置时有的速度或加速度等于零于是速度或加速度多边形变得更为简,,,.单这往往反而迷惑不解这时如果能写出图解关系式则对图解求解大有裨益图2一3a和C为两个处于特殊位置的铰链四杆机构,欲求c点的速度,其速度向量方程式均,为几一议十说方向上CD土AB土BC。,^。大小?L?图解关系式命一命+氏.:,。,。,作速度多边形如图2一3b和d所示作法为过加速度极点P点作Pb土AB而二L^/、再由,,。ab作bC土BC由p点作pe土CD则Pc和bc的交点即所求速度多边形中的c点由图2一3b知图·47·\nCv。v,:。2一v。。机构点速度~一叨岛方向向右由图3a知图C机构C点速度一o2一乃图,,、、,显然利用图解关系式象上面那样作图由于各速度向量的方向起点终点都很清楚这类题的图解问题也就迎刃而解了。致于图解关系式规律性很强,现以一般位置铰链四杆机构的加速度向量方程式为例加以说明。+成一+a,aae交偏十砚冬十冬.·:~-,,之一,今由+一书宁图解关系式户,J一白-。3,万们去、花7一一,.J.一了一广O衬2,卜刀ZC井—尸+一不难看出¹合向量和分向量组的起终点相同。º前一个分向量的矢端即后一个分向量的起点。式,,。n为法向加速度的矢端也是切向加速度的起点其下角标为构件代号中按这一规律结合速度和加速度多边形的特性.就很容易写出图解关系式。2.3有无哥氏加速度的问题C)Q)之一洋图,。,。通常认为当牵连运动为转动相对运动为移动时有哥氏加速度这是对的但并不全面图2一,,:3,。4a所示的移动导杆机构牵连运动为平动。~。一O无哥氏加速度图2一4b所示的摆动导杆机,.,..,,。。3。。:构牵连运动为转动但在机构处于AB土BC的瞬时场~。一oaazx一2、3B一0无哥氏加速。.,.,2一4。33B:度图c所示的导杆机构牵连运动为转动一叻井0但在图示位置场~0也无哥氏加速...aB33B:度所以笔者认为对这一问题可以这祥简单的处理即用公式扩一2姚tha进行判别如牵连角··48\n:,,,。速度叻和相对速度、sB均不为零则有哥氏加速度如两者之一为零则无哥氏加速度由于加速,,度分析是在速度分析的基础上进行的即加速度分析前牵连角速度和相对速度均已知故这样判别既简便又准确。3例题护‘。了r~.,尸姚b)b‘)、以.图乃一[a^。,Ls;,x。,甲,已知图3一l所示机构各构件的尺寸L=60mm=120mm=65mm原动件位置=,,:s,。:,。60角速度。~ad/角加速度~O试求构件5的速度和加速度,。解取uL一一一mm作机构位置图如图3一l·所示3m/m沈器,:根据已知条件该题的求解顺序为v,v。:v。;vsvc~~(=)__.~_,,今卜~、如.一,~,气“召亡孟C“DZ口n4气住5夕一一~~(1)速度分析。,,..。。Is=L=10丫006=06。/v,,vc一+vc方向/AC土AB上BC·大小?06m/s?图解关系式Pc一神十加\n.0.6一。。:,作速度多边形pb。如图3一l。所示.这样构件:上B、取速度比例尺阵一-竺器”‘l,‘,:。:aC两点的速度均已知构件2上D点的速度即可用影像法求得具体作法为自图的B点画一线。,’Z’,段BC’一b(图b)连cC’过D作cC’的平行线交Bd于d在图b的bc线上自b截取bd,:2,.一(图。)贝即代表、Bd’献于是由图可得..,。·vc~产肠一002x17~034m/s.vca034.,a~28d/s(逆时针)叻一一正万厄瓦刀D4-秒D4DZDEp:BC方向/一d/、Z大小?。Pd一(图解关系式贫盆+苗户Z:,;。在图b上作多边形pdd则口代表、油...v:v。;,·;、一~户Pd一002义35=007。/构件5的速度直向上。..voZ。;群,:;s=dd=002又31=062。/(2)加速度分析a,一。,ZL,。~10,又0.06~6了n/。2...aea’aLa。34’12一096s,=峪/=0/0m/...a;。:·。。;。:52息一2。一2又28又062=3471n/c,十三a川尸a三应吕三赶方向/ACB~AC一B土BC.s096ms2大小?6m/?图解关系式叮~今+气一今一一户尸井节.儿2儿ZC尹了b...a,96一06冬016则孟的图示长度牙.a,.。取加速度比例尺脚~一/群=.375爪仍b’矿-6竺016·50·\n,,。,C’:作加速度多边形pb’c’如图C所示并用前述作等比线段的方法在b’上定出d的位置。D4DZa乞;n:;三二十十,:方向/DE沪~d土BC/BC.,.林pd,2347ms:大小?/?~沪倪一卜~叮’,:十d燕7+拱Pd,·2。。。。;蕊的方向为瓦忑的方声刃念沿。的方向(逆时针)转9。j厄诬不的图示长度为‘厂一刀一...。,.;.16=217..25峨7/0二二作加速度多边形,d无d如图e所示则构件5的加速度为~..a。=a。;s,=洲Z了几=016x52=532二/;,.方向同挤万)直向下至,。此本题所要求的各项已全部求出参考文献,,,,〔1〕孙桓傅则绍主编机械原理高等教育出版社1989年,,,,,。〔2〕孙桓李继庆编机械原理教材学习指南高等教育出版社1987年P2。一34,,,,。〔3〕马永林主编机械原理高等教育出版社1992年P26一40,,,,。〔们中央广播电视大学杂志编辑部编机械吉林科学技术出版社1985年P109一123USINGRELATIVEMOTIONGRAPHICMETHODTOANALYSETHEMOVEMENTOFMECHANISMChenGuangyongePartmentofMeehaniealEngineerins)(DAbstraetnthisPaPer,theautoreussessoeainuestionsnusngreativeotiongraPhieethooana-Ihd沾mmqiilmmdtlseteo,.yhmvementofPlanemeehanismandtriestoexpoundsomelawsiniteo:,,,.KywrdsrelativemotiongraPhiemethodveloeityaeeeleration·51查看更多