- 2021-05-15 发布 |
- 37.5 KB |
- 4页


申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
技能培训专题-EPSON安全防护指导
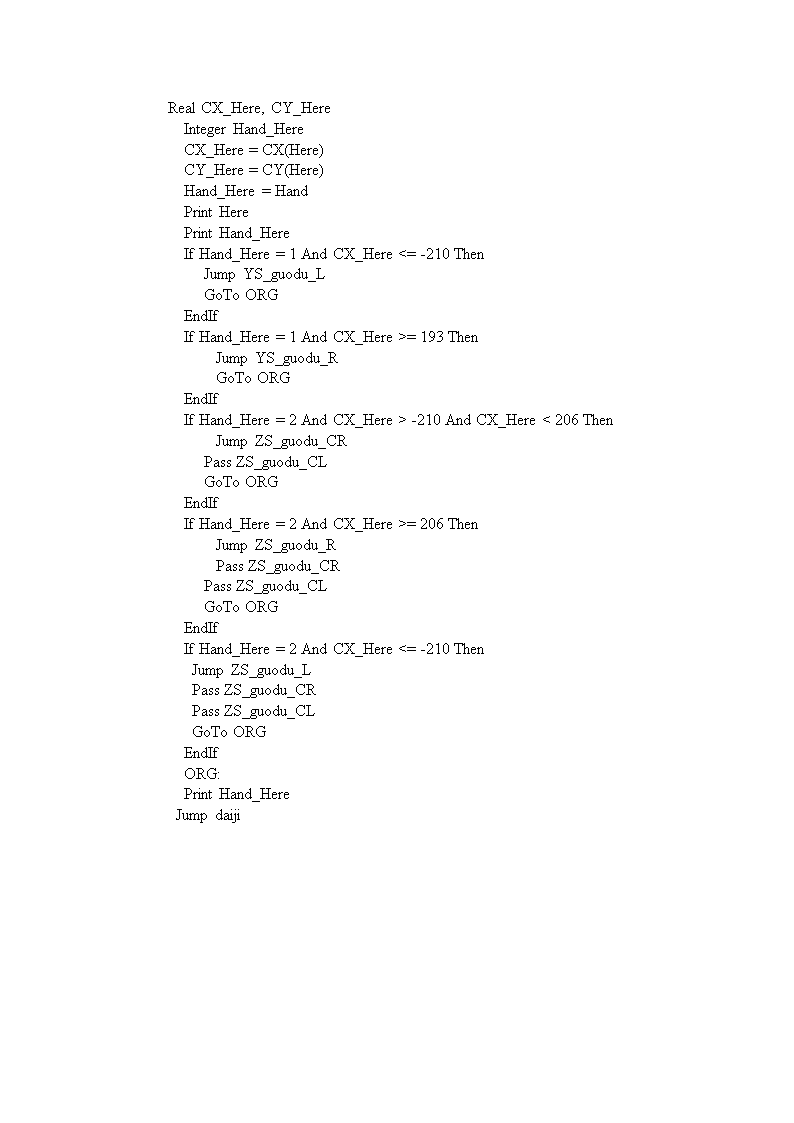
EPSON 安全防护指导 1、硬件防护 1)紧急停止开关 在安全 I/O 里将 9 和 10 二路急停信号接到外部急停开关, 当出现紧急情况时,按下急停开关,机械立即伺服 OFF,刹车打开,机械 减速停止。 2)安全门信号 在机械手工作范围外加装安全门,然后将安全门信号接到 7 和 20 二路安 全门信号输入,当安全门打开,机械手立即停止当前操作,恢复时先将安全门 合上,输入一个复位信号,然后再起动 2、软件防护 1)使用“XYLIM”指令设定 XY 极限,当极限值设定为 0 时不使用极限设 置,示例如下: 2)使用“TCLIM”指令设定指定轴的扭力,然后再程序里使用扭力控制方式 移动指令。示例如下 3)执行指令前先将 Z 轴抬升到一个安全位置后再执行其他移动指令或使用 Jump 指令,示例如下 Real CZ_here CZ_here=CZ(here) If CZ_here <-10Then Go here:z(-10) Endif Go P100 4)当工作区域内有障碍时,可以先使用 CX、CY、CZ、CU 指令先读取当前位 置,然后后根据具体障碍所在位置设定一个中间点,执行指令的时候先经过 点再绕到目标位置。下例中由于左前方和右前方都有障碍,并且从左边到右 还需要切换手系,所以在初始化回待机位置时要根据选择回待机位,根据手 臂的姿势以及 X、Y 的坐标值。示例如下: Real CX_Here, CY_Here Integer Hand_Here CX_Here = CX(Here) CY_Here = CY(Here) Hand_Here = Hand Print Here Print Hand_Here If Hand_Here = 1 And CX_Here <= -210 Then Jump YS_guodu_L GoTo ORG EndIf If Hand_Here = 1 And CX_Here >= 193 Then Jump YS_guodu_R GoTo ORG EndIf If Hand_Here = 2 And CX_Here > -210 And CX_Here < 206 Then Jump ZS_guodu_CR Pass ZS_guodu_CL GoTo ORG EndIf If Hand_Here = 2 And CX_Here >= 206 Then Jump ZS_guodu_R Pass ZS_guodu_CR Pass ZS_guodu_CL GoTo ORG EndIf If Hand_Here = 2 And CX_Here <= -210 Then Jump ZS_guodu_L Pass ZS_guodu_CR Pass ZS_guodu_CL GoTo ORG EndIf ORG: Print Hand_Here Jump daiji 5)通过“ERR”指令获取报警代码,示例如下查看更多