- 2022-09-27 发布 |
- 37.5 KB |
- 4页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
labview在平面四杆机构运动分析与仿真的应用
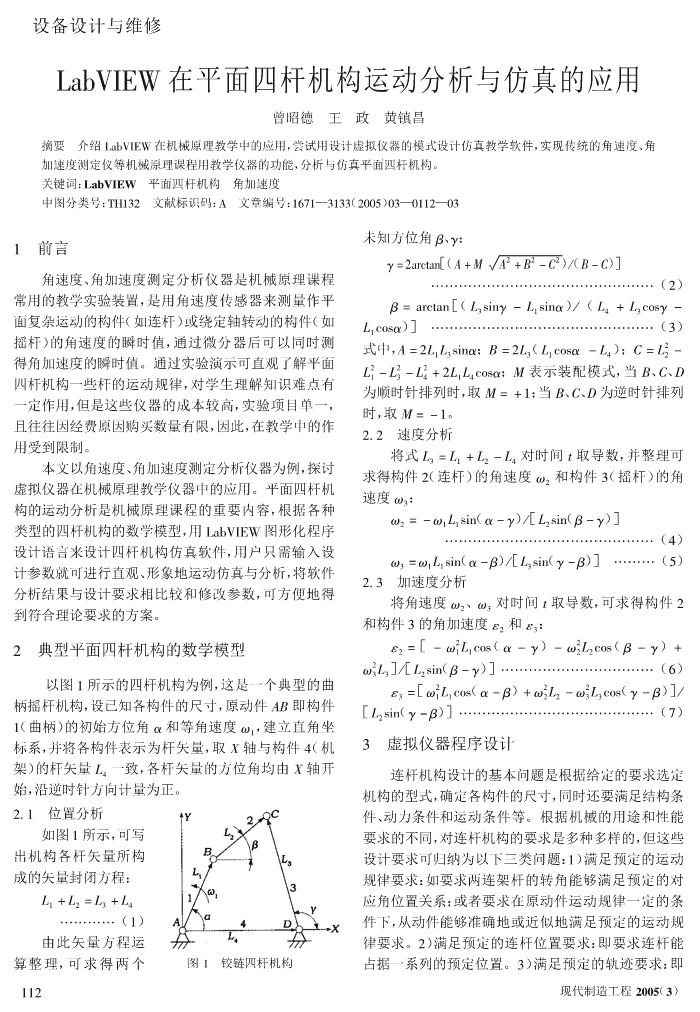
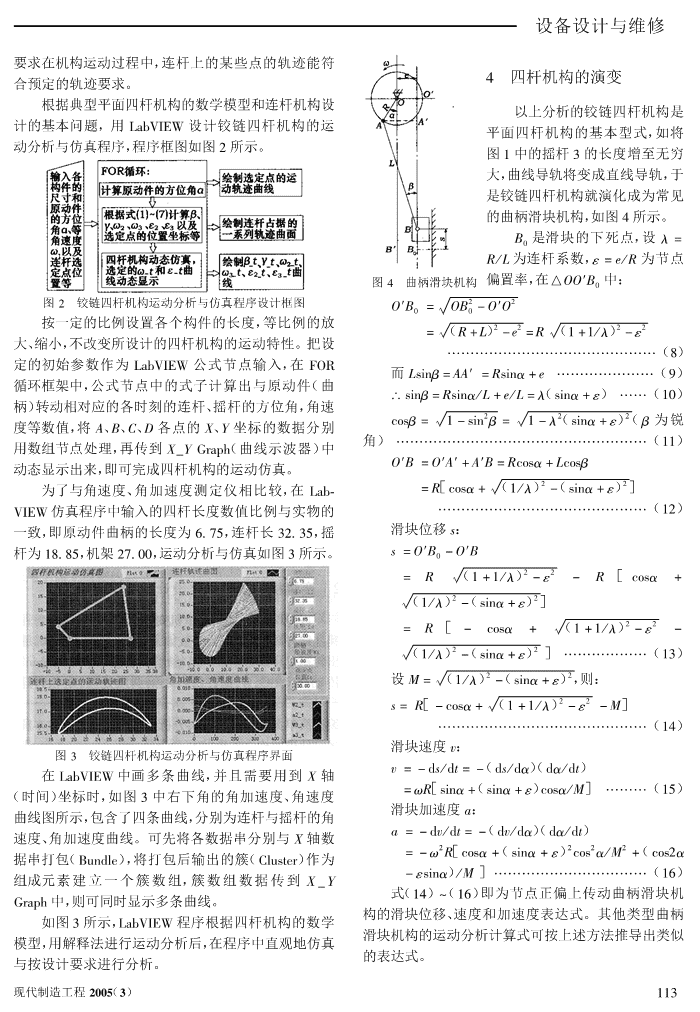
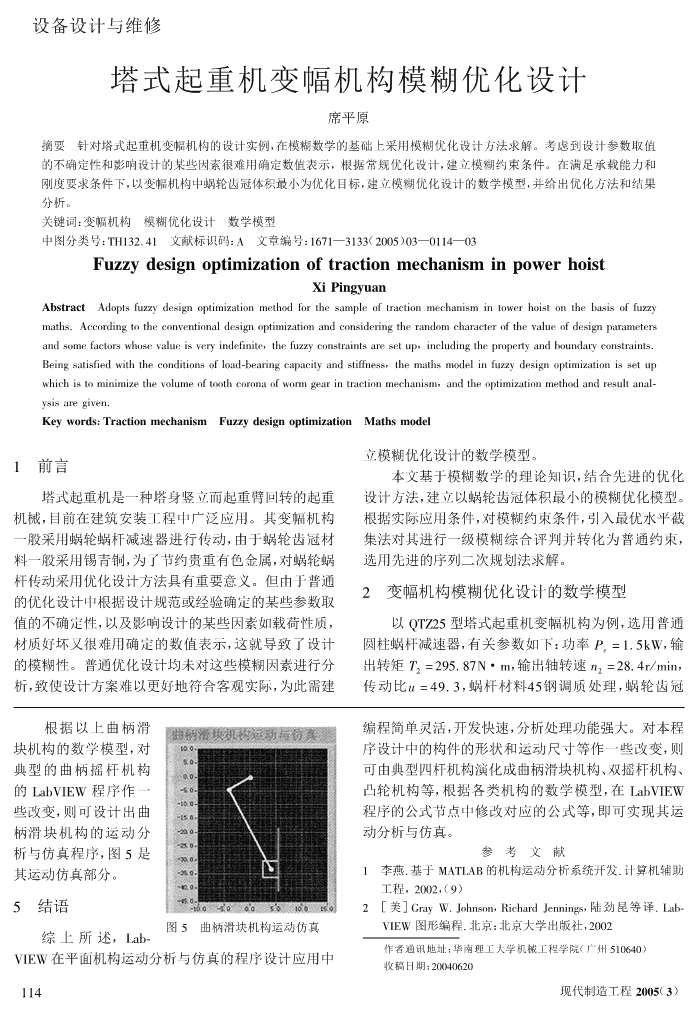
设备设计与维修LabVIEW在平面四杆机构运动分析与仿真的应用曾昭德王政黄镇昌摘要介绍LabVIEW在机械原理教学中的应用,尝试用设计虚拟仪器的模式设计仿真教学软件,实现传统的角速度、角加速度测定仪等机械原理课程用教学仪器的功能,分析与仿真平面四杆机构。关键词:LabVIEW平面四杆机构角加速度中图分类号:T~l32文献标识码:A文章编号:l67l—3l33(2005)03—0ll2—03未知方位角、:l前言222=2arctan[(A+M!A+B-C)(/B-C)]角速度、角加速度测定分析仪器是机械原理课程!!!!!!!!!!!!!!!!(2)常用的教学实验装置,是用角速度传感器来测量作平=arctan[(L3sin-Llsin)/(L4+L3cos-面复杂运动的构件(如连杆)或绕定轴转动的构件(如Llcos)]!!!!!!!!!!!!!!!!(3)摇杆)的角速度的瞬时值,通过微分器后可以同时测2式中,A=2LlL3sin;B=2L(3Llcos-L4);C=L2-得角加速度的瞬时值。通过实验演示可直观了解平面222Ll-L3-L4+2LlL4cos;M表示装配模式,当B、C、D四杆机构一些杆的运动规律,对学生理解知识难点有为顺时针排列时,取M=+l;当B、C、D为逆时针排列一定作用,但是这些仪器的成本较高,实验项目单一,时,取M=-l。且往往因经费原因购买数量有限,因此,在教学中的作2.2速度分析用受到限制。将式L3=Ll+L2-L4对时间I取导数,并整理可本文以角速度、角加速度测定分析仪器为例,探讨求得构件2(连杆)的角速度2和构件3(摇杆)的角虚拟仪器在机械原理教学仪器中的应用。平面四杆机速度3:构的运动分析是机械原理课程的重要内容,根据各种2=-lLlsin(-)[/L2sin(-)]类型的四杆机构的数学模型,用LabVIEW图形化程序!!!!!!!!!!!!!!!(4)设计语言来设计四杆机构仿真软件,用户只需输入设3=lLlsin(-)[/L3sin(-)]!!!(5)计参数就可进行直观、形象地运动仿真与分析,将软件2.3加速度分析分析结果与设计要求相比较和修改参数,可方便地得将角速度2、3对时间I取导数,可求得构件2到符合理论要求的方案。和构件3的角加速度S2和S3:222典型平面四杆机构的数学模型S2=[-lLlcos(-)-2L2cos(-)+23L3][/L2sin(-)]!!!!!!!!!!!(6)以图l所示的四杆机构为例,这是一个典型的曲222S3=[lLlcos(-)+2L2-3L3cos(-)]/柄摇杆机构,设已知各构件的尺寸,原动件AB即构件[L2sin(-)]!!!!!!!!!!!!!!(7)l(曲柄)的初始方位角和等角速度l,建立直角坐标系,并将各构件表示为杆矢量,取X轴与构件4(机3虚拟仪器程序设计架)的杆矢量L4一致,各杆矢量的方位角均由X轴开连杆机构设计的基本问题是根据给定的要求选定始,沿逆时针方向计量为正。机构的型式,确定各构件的尺寸,同时还要满足结构条2.l位置分析件、动力条件和运动条件等。根据机械的用途和性能如图l所示,可写要求的不同,对连杆机构的要求是多种多样的,但这些出机构各杆矢量所构设计要求可归纳为以下三类问题:l)满足预定的运动成的矢量封闭方程:规律要求:如要求两连架杆的转角能够满足预定的对Ll+L2=L3+L4应角位置关系;或者要求在原动件运动规律一定的条!!!!(l)件下,从动件能够准确地或近似地满足预定的运动规由此矢量方程运律要求。2)满足预定的连杆位置要求:即要求连杆能算整理,可求得两个图l铰链四杆机构占据一系列的预定位置。3)满足预定的轨迹要求:即ll2现代制造工程2005(3)\n设备设计与维修要求在机构运动过程中,连杆上的某些点的轨迹能符4四杆机构的演变合预定的轨迹要求。根据典型平面四杆机构的数学模型和连杆机构设以上分析的铰链四杆机构是计的基本问题,用LabVIEW设计铰链四杆机构的运平面四杆机构的基本型式,如将动分析与仿真程序,程序框图如图2所示。图1中的摇杆3的长度增至无穷大,曲线导轨将变成直线导轨,于是铰链四杆机构就演化成为常见的曲柄滑块机构,如图4所示。B0是滑块的下死点,设A=R/L为连杆系数,S=e/R为节点图4曲柄滑块机构偏置率,在!00'B0中:图2铰链四杆机构运动分析与仿真程序设计框图0'B=0B2-0'020!0按一定的比例设置各个构件的长度,等比例的放2222=!(R+L)-e=R!(1+1/A)-S大、缩小,不改变所设计的四杆机构的运动特性。把设!!!!!!!!!!!!!!!(8)定的初始参数作为LabVIEW公式节点输入,在FOR而LsinB=AA'=RsinO+e!!!!!!!(9)循环框架中,公式节点中的式子计算出与原动件(曲sinB=RsinO/L+e/L=A(sinO+S)!!(10)柄)转动相对应的各时刻的连杆、摇杆的方位角,角速222度等数值,将A、B、C、D各点的X、Y坐标的数据分别cosB=!1-sinB=!1-A(sinO+S)(B为锐角)!!!!!!!!!!!!!!!!!!(11)用数组节点处理,再传到X_YGraph(曲线示波器)中0'B=0'A'+A'B=RcosO+LcosB动态显示出来,即可完成四杆机构的运动仿真。22为了与角速度、角加速度测定仪相比较,在Lab-=R[cosO+!(1/A)-(sinO+S)]VIEW仿真程序中输入的四杆长度数值比例与实物的!!!!!!!!!!!!!!!(12)一致,即原动件曲柄的长度为6.75,连杆长32.35,摇滑块位移S:杆为18.85,机架27.00,运动分析与仿真如图3所示。S=0'B0-0'B22=R!(1+1/A)-S-R[cosO+22!(1/A)-(sinO+S)]22=R[-cosO+!(1+1/A)-S-22!(1/A)-(sinO+S)]!!!!!!(13)22设M=!(1/A)-(sinO+S),则:22S=R[-cosO+!(1+1/A)-S-M]!!!!!!!!!!!!!!!(14)滑块速度1:图3铰链四杆机构运动分析与仿真程序界面1=-cS/ct=-(cS/cO)(cO/ct)在LabVIEW中画多条曲线,并且需要用到X轴=R[sinO+(sinO+S)cosO/M]!!!(15)(时间)坐标时,如图3中右下角的角加速度、角速度滑块加速度a:曲线图所示,包含了四条曲线,分别为连杆与摇杆的角a=-c1/ct=-(c1/cO)(cO/ct)速度、角加速度曲线。可先将各数据串分别与X轴数2222=-R[cosO+(sinO+S)cosO/M+(cos2O据串打包(Buncie),将打包后输出的簇(Ciuster)作为-SsinO)/M]!!!!!!!!!!!(16)组成元素建立一个簇数组,簇数组数据传到X_Y式(14)~(16)即为节点正偏上传动曲柄滑块机Graph中,则可同时显示多条曲线。构的滑块位移、速度和加速度表达式。其他类型曲柄如图3所示,LabVIEW程序根据四杆机构的数学滑块机构的运动分析计算式可按上述方法推导出类似模型,用解释法进行运动分析后,在程序中直观地仿真的表达式。与按设计要求进行分析。现代制造工程!""#($)113\n设备设计与维修塔式起重机变幅机构模糊优化设计席平原摘要针对塔式起重机变幅机构的设计实例,在模糊数学的基础上采用模糊优化设计方法求解。考虑到设计参数取值的不确定性和影响设计的某些因素很难用确定数值表示,根据常规优化设计,建立模糊约束条件。在满足承载能力和刚度要求条件下,以变幅机构中蜗轮齿冠体积最小为优化目标,建立模糊优化设计的数学模型,并给出优化方法和结果分析。关键词:变幅机构模糊优化设计数学模型中图分类号:Th132.41文献标识码:A文章编号:1671—3133(2005)03—0114—03fuzzydesignoptimizationoftractionmechanisminpowerhoistXiPingyuanAbstractAdoptsfuzzydesignoptimizationmethodforthesampieoftractionmechanismintowerhoistonthebasisoffuzzymaths.Accordingtotheconventionaidesignoptimizationandconsideringtherandomcharacterofthevaiueofdesignparametersandsomefactorswhosevaiueisveryindefinite,thefuzzyconstraintsaresetup,inciudingthepropertyandboundaryconstraints.Beingsatisfiedwiththeconditionsofioad-bearingcapacityandstiffness,themathsmodeiinfuzzydesignoptimizationissetupwhichistominimizethevoiumeoftoothcoronaofwormgearintractionmechanism,andtheoptimizationmethodandresuitanai-ysisaregiven.Keywords:TractionmechanismfuzzydesignoptimizationMathsmodel立模糊优化设计的数学模型。1前言本文基于模糊数学的理论知识,结合先进的优化塔式起重机是一种塔身竖立而起重臂回转的起重设计方法,建立以蜗轮齿冠体积最小的模糊优化模型。机械,目前在建筑安装工程中广泛应用。其变幅机构根据实际应用条件,对模糊约束条件,引入最优水平截一般采用蜗轮蜗杆减速器进行传动,由于蜗轮齿冠材集法对其进行一级模糊综合评判并转化为普通约束,料一般采用锡青铜,为了节约贵重有色金属,对蜗轮蜗选用先进的序列二次规划法求解。杆传动采用优化设计方法具有重要意义。但由于普通2变幅机构模糊优化设计的数学模型的优化设计中根据设计规范或经验确定的某些参数取值的不确定性,以及影响设计的某些因素如载荷性质,以OTZ25型塔式起重机变幅机构为例,选用普通材质好坏又很难用确定的数值表示,这就导致了设计圆柱蜗杆减速器,有关参数如下:功率Pe=1.5kW,输的模糊性。普通优化设计均未对这些模糊因素进行分出转矩T2=295.87N·m,输出轴转速n2=28.4r/min,析,致使设计方案难以更好地符合客观实际,为此需建传动比u=49.3,蜗杆材料45钢调质处理,蜗轮齿冠根据以上曲柄滑编程简单灵活,开发快速,分析处理功能强大。对本程块机构的数学模型,对序设计中的构件的形状和运动尺寸等作一些改变,则典型的曲柄摇杆机构可由典型四杆机构演化成曲柄滑块机构、双摇杆机构、的LabVIEW程序作一凸轮机构等,根据各类机构的数学模型,在LabVIEW些改变,则可设计出曲程序的公式节点中修改对应的公式等,即可实现其运柄滑块机构的运动分动分析与仿真。析与仿真程序,图5是参考文献其运动仿真部分。1李燕.基于MATLAB的机构运动分析系统开发.计算机辅助工程,2002,(9)5结语2[美]GrayW.Johnson,RichardJennings,陆劲昆等译.Lab-图5曲柄滑块机构运动仿真VIEW图形编程.北京:北京大学出版社,2002综上所述,Lab-作者通讯地址:华南理工大学机械工程学院(广州510640)VIEW在平面机构运动分析与仿真的程序设计应用中收稿日期:20040620114现代制造工程2005(3)\nLabVIEW在平面四杆机构运动分析与仿真的应用作者:曾昭德,王政,黄镇昌作者单位:华南理工大学机械工程学院,广州,510640刊名:现代制造工程英文刊名:MODERNMANUFACTURINGENGINEERING年,卷(期):2005(3)被引用次数:1次参考文献(2条)1.李燕基于MATLAB的机构运动分析系统开发[期刊论文]-计算机辅助工程2002(3)2.GrayW.Johnson;RichardJennings;陆劲昆LabVIEW图形编程2002本文读者也读过(10条)1.黄浩东.陈宗基.HuangHaodong.ChenZongji虚拟原型技术及控制工程中的虚拟原型机[期刊论文]-北京航空航天大学学报1999,25(3)2.赵莉香.殷国富.ZHAOLi-xiang.YINGuo-fu基于虚拟原型的风机设计方法研究[期刊论文]-煤矿机械2008,29(1)3.张新亮.殷国富.ZHANGXin-liang.YINGuo-fu虚拟原型技术在机电产品开发中的应用[期刊论文]-中国制造业信息化2006,35(9)4.李湘宁.董亚男.LIXiang-ning.DONGYa-nan基于虚拟原型技术的模具设计探讨[期刊论文]-机械设计与制造2007(8)5.孙长友工程扫描仪滑架部件力学特性和热特性分析[学位论文]20086.刘得军.牟海维.罗小川.车仁生并联坐标测量机建模理论及其虚拟原型设计[期刊论文]-组合机床与自动化加工技术2001(7)7.袁海军.黄春永.谢云峰基于SolidWorks的呼吸自动调节器三维建模及运动仿真[期刊论文]-机械工程师2010(12)8.赵晶晶.周燕.时振刚.孙卓.赵雷基于Labview的电磁轴承辨识系统设计[会议论文]-20079.JavierGutierrez.ChristianFritz.StephenEndersby虚拟原型技术与机电一体化设计结合[期刊论文]-中国电子商情·基础电子2010(11)10.杨强.郭阳.彭宇行.李思昆基于虚拟原型的概念设计描述模型V-desModel[期刊论文]-软件学报2002,13(4)引证文献(1条)1.贾庆浩.刘林基于EON的虚拟运动仿真平台设计与实现[期刊论文]-计算机技术与发展2011(9)本文链接:http://d.g.wanfangdata.com.cn/Periodical_jxgys200503047.aspx查看更多