- 2022-09-27 发布 |
- 37.5 KB |
- 4页

申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
基于adams的移栽机关键机构设计与运动仿真分析
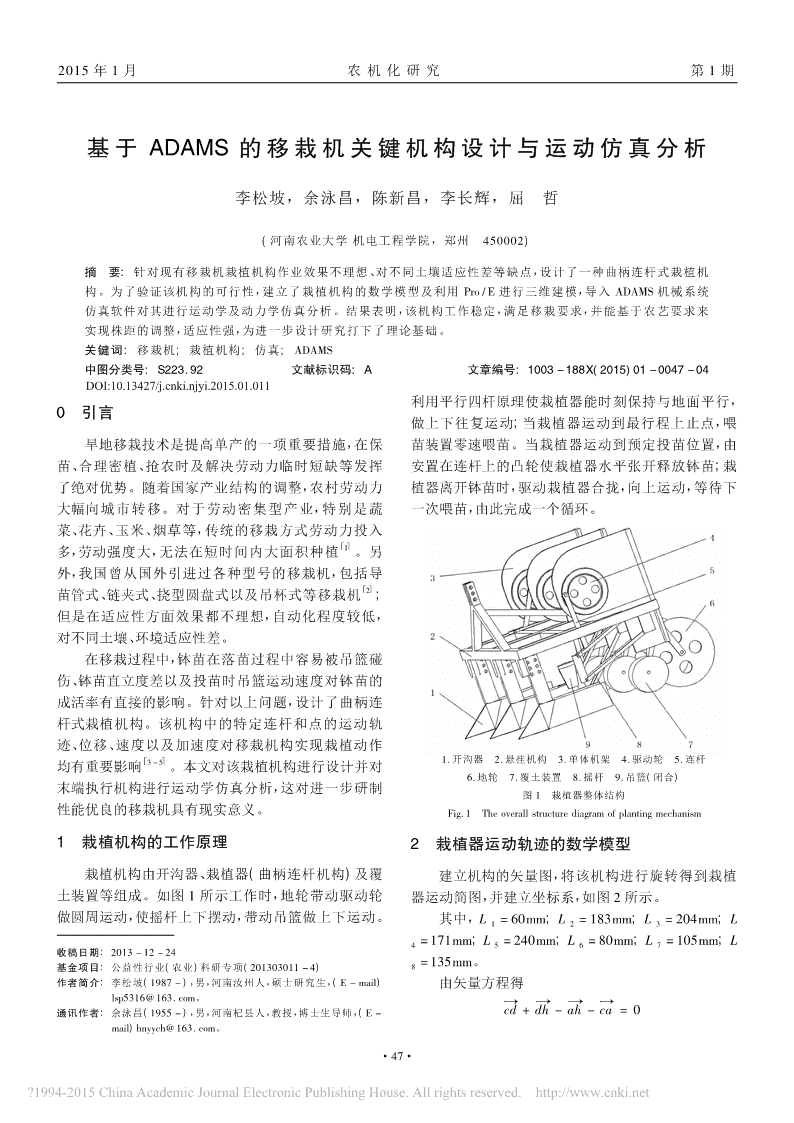
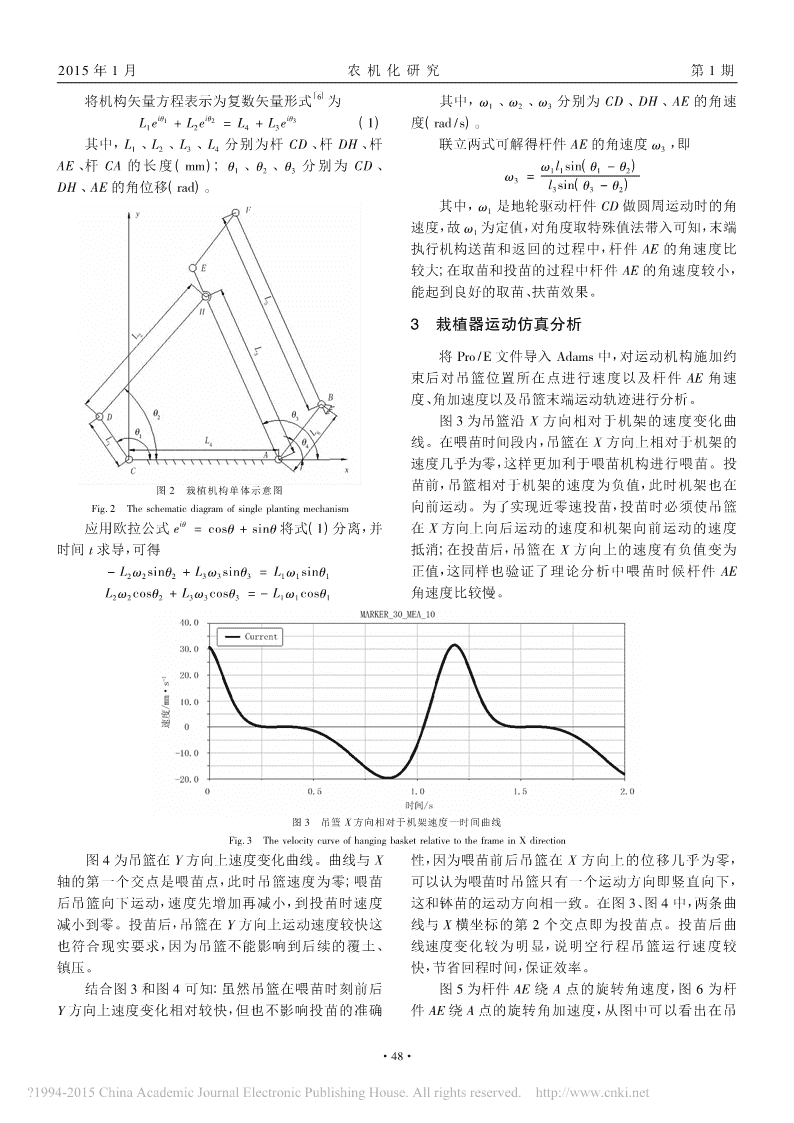
2015年1月农机化研究第1期基于ADAMS的移栽机关键机构设计与运动仿真分析李松坡,余泳昌,陈新昌,李长辉,屈哲(河南农业大学机电工程学院,郑州450002)摘要:针对现有移栽机栽植机构作业效果不理想、对不同土壤适应性差等缺点,设计了一种曲柄连杆式栽植机构。为了验证该机构的可行性,建立了栽植机构的数学模型及利用Pro/E进行三维建模,导入ADAMS机械系统仿真软件对其进行运动学及动力学仿真分析。结果表明,该机构工作稳定,满足移栽要求,并能基于农艺要求来实现株距的调整,适应性强,为进一步设计研究打下了理论基础。关键词:移栽机;栽植机构;仿真;ADAMS中图分类号:S223.92文献标识码:A文章编号:1003-188X(2015)01-0047-04DOI:10.13427/j.cnki.njyi.2015.01.011利用平行四杆原理使栽植器能时刻保持与地面平行,0引言做上下往复运动;当栽植器运动到最行程上止点,喂旱地移栽技术是提高单产的一项重要措施,在保苗装置零速喂苗。当栽植器运动到预定投苗位置,由苗、合理密植、抢农时及解决劳动力临时短缺等发挥安置在连杆上的凸轮使栽植器水平张开释放钵苗;栽了绝对优势。随着国家产业结构的调整,农村劳动力植器离开钵苗时,驱动栽植器合拢,向上运动,等待下大幅向城市转移。对于劳动密集型产业,特别是蔬一次喂苗,由此完成一个循环。菜、花卉、玉米、烟草等,传统的移栽方式劳动力投入[1]多,劳动强度大,无法在短时间内大面积种植。另外,我国曾从国外引进过各种型号的移栽机,包括导[2]苗管式、链夹式、挠型圆盘式以及吊杯式等移栽机;但是在适应性方面效果都不理想,自动化程度较低,对不同土壤、环境适应性差。在移栽过程中,钵苗在落苗过程中容易被吊篮碰伤、钵苗直立度差以及投苗时吊篮运动速度对钵苗的成活率有直接的影响。针对以上问题,设计了曲柄连杆式栽植机构。该机构中的特定连杆和点的运动轨迹、位移、速度以及加速度对移栽机构实现栽植动作[3-5]1.开沟器2.悬挂机构3.单体机架4.驱动轮5.连杆均有重要影响。本文对该栽植机构进行设计并对6.地轮7.覆土装置8.摇杆9.吊篮(闭合)末端执行机构进行运动学仿真分析,这对进一步研制图1栽植器整体结构性能优良的移栽机具有现实意义。Fig.1Theoverallstructurediagramofplantingmechanism1栽植机构的工作原理2栽植器运动轨迹的数学模型栽植机构由开沟器、栽植器(曲柄连杆机构)及覆建立机构的矢量图,将该机构进行旋转得到栽植土装置等组成。如图1所示工作时,地轮带动驱动轮器运动简图,并建立坐标系,如图2所示。做圆周运动,使摇杆上下摆动,带动吊篮做上下运动。其中,L1=60mm;L2=183mm;L3=204mm;L4=171mm;L5=240mm;L6=80mm;L7=105mm;L收稿日期:2013-12-24基金项目:公益性行业(农业)科研专项(201303011-4)8=135mm。作者简介:李松坡(1987-),男,河南汝州人,硕士研究生,(E-mail)由矢量方程得lsp5316@163.com。→→→→通讯作者:余泳昌(1955-),男,河南杞县人,教授,博士生导师,(E-cd+dh-ah-ca=0mail)hnyych@163.com。·47·\n2015年1月农机化研究第1期[6]将机构矢量方程表示为复数矢量形式为其中,ω1、ω2、ω3分别为CD、DH、AE的角速iθ1iθ2iθ3L1e+L2e=L4+L3e(1)度(rad/s)。其中,L1、L2、L3、L4分别为杆CD、杆DH、杆联立两式可解得杆件AE的角速度ω3,即AE、杆CA的长度(mm);θ1、θ2、θ3分别为CD、ω1l1sin(θ1-θ2)ω3=DH、AE的角位移(rad)。l3sin(θ3-θ2)其中,ω1是地轮驱动杆件CD做圆周运动时的角速度,故ω1为定值,对角度取特殊值法带入可知,末端执行机构送苗和返回的过程中,杆件AE的角速度比较大;在取苗和投苗的过程中杆件AE的角速度较小,能起到良好的取苗、扶苗效果。3栽植器运动仿真分析将Pro/E文件导入Adams中,对运动机构施加约束后对吊篮位置所在点进行速度以及杆件AE角速度、角加速度以及吊篮末端运动轨迹进行分析。图3为吊篮沿X方向相对于机架的速度变化曲线。在喂苗时间段内,吊篮在X方向上相对于机架的速度几乎为零,这样更加利于喂苗机构进行喂苗。投图2栽植机构单体示意图苗前,吊篮相对于机架的速度为负值,此时机架也在Fig.2Theschematicdiagramofsingleplantingmechanism向前运动。为了实现近零速投苗,投苗时必须使吊篮iθ应用欧拉公式e=cosθ+sinθ将式(1)分离,并在X方向上向后运动的速度和机架向前运动的速度时间t求导,可得抵消;在投苗后,吊篮在X方向上的速度有负值变为-L2ω2sinθ2+L3ω3sinθ3=L1ω1sinθ1正值,这同样也验证了理论分析中喂苗时候杆件AEL2ω2cosθ2+L3ω3cosθ3=-L1ω1cosθ1角速度比较慢。图3吊篮X方向相对于机架速度—时间曲线Fig.3ThevelocitycurveofhangingbasketrelativetotheframeinXdirection图4为吊篮在Y方向上速度变化曲线。曲线与X性,因为喂苗前后吊篮在X方向上的位移几乎为零,轴的第一个交点是喂苗点,此时吊篮速度为零;喂苗可以认为喂苗时吊篮只有一个运动方向即竖直向下,后吊篮向下运动,速度先增加再减小,到投苗时速度这和钵苗的运动方向相一致。在图3、图4中,两条曲减小到零。投苗后,吊篮在Y方向上运动速度较快这线与X横坐标的第2个交点即为投苗点。投苗后曲也符合现实要求,因为吊篮不能影响到后续的覆土、线速度变化较为明显,说明空行程吊篮运行速度较镇压。快,节省回程时间,保证效率。结合图3和图4可知:虽然吊篮在喂苗时刻前后图5为杆件AE绕A点的旋转角速度,图6为杆Y方向上速度变化相对较快,但也不影响投苗的准确件AE绕A点的旋转角加速度,从图中可以看出在吊·48·\n2015年1月农机化研究第1期篮喂苗前后杆件AE的角加速度变化较为平稳,这样加速度变化较为明显,这一结果也印证了理论计算中能把对钵苗的机械性伤害降到最低。投苗后吊篮的吊篮空行程耗时短的结果。图4吊篮Y方向速度—时间曲线Fig.4ThevelocitycurveofhangingbasketinYdirection图5杆件AE绕A点角速度—时间曲线Fig.5TheangularvelocityofrockerAEoverpointA图6杆件AE绕A点角加速度速度—时间曲线Fig.6TheangularangularaccelerationofrockerAEoverpointA栽植器的运动轨迹决定了钵苗的运动轨迹,是衡直向下的速度为主,同钵苗运动方向一致,便于喂苗。量栽植器性能的决定性因素。图7为吊篮末端的运行在投苗过程中吊篮相对于机架向后的速度和机架向轨迹,黑点为相同间隔所记录的点。在喂苗和投苗的前的速度相抵消,不仅能在最大程度上实现零速投过程中,黑点较为密集,说明吊篮在相应区域所停留苗,而且能减小对钵苗的机械性伤害。的时间较长,有利于喂苗和投苗。2)采用曲柄连杆机构来重新构架移栽机,结构简单、实用,对不同类型条件的适应性强,4结论3)对设计出关键零部件进行虚拟仿真,理论上满1)吊篮在喂苗过程中水平方向上位移较小,以竖足移栽要求,为进一步研究自动化程度高、移栽性能·49·\n2015年1月农机化研究第1期好的移栽机提供了理论依据。[1]吴广伟,宋建,农彭旭.我国蔬菜育苗移栽机械化的现状发展方向[C]//学术年会论文集:主要作物生产机械化2006:186-190.[2]金城谦,吴崇友,袁文胜.链夹式移栽机栽植作业质量影响因素分析[J].农业工程学报,2008,39(9):196-198.[3]刘婷婷,罗娟,侯书林.基手MATLAB的移栽机栽插机构的运动学分析[J].农机化研究,2009,31(9):68-71.[4]肖名涛.烤烟钵苗栽植机构运动学和动力学分析与仿真[D].长沙:湖南农业大学,2010.[5]封俊,秦贵.移栽机的吊杯运动分析与设计准则[J].农图7栽植器运动轨迹业机械学报,2002(9):48-50.Fig.7Trajectorydiagramoftransplanter[6]孙桓,陈作模,葛文杰.机械原理(7版)[M].北京:高等参考文献:教育出版社,2010:134-138.KeyInstitutionsDesignandMotionSimulationAnalysisUsedforTransplantersBasedonADAMSLiSongpo,YuYongchang,ChenXinchang,LiChanghui,QuZhe(CollegeofMechanicalandElectricalEngineering,HenanAgriculturalUniversity,Zhengzhou450002,China)Abstract:Accordingtotheoperationeffectofthepriortransplantertransplantingmechanismisnotideal,thedisadvanta-gesofthedifferentsoiladaptability,designedacrankconnectingrodtypeplantingmechanism.Inordertoverifythefea-sibilityoftheinstitutions,byestablishingthemathematicalmodelofthetransplantingmechanism,Pro/Ethree-dimen-sionalmodeling,simulationsoftwaretoimportADAMSmechanicalsystemanalysissimulateitskinematicsanddynamicsofthismechanism.Theagencyworksstabilityandsatisfiestherequirementsoftransplanting.Itcanadjusttheplantingdistancebasedonagronomicrequirementswhichhasastrongadaptability,laidatheoreticalfoundationforfurtherdesignstudies.Keywords:transplanters;plantingmechanism;simulation;ADAMS·50·查看更多