并联机床的运动仿真和运动学正解计算
第!"卷第#期计算机辅助设计与图形学学报:;<=!",*;=#$%%#年#月&’()*+,’-.’/0(12)3+452552647*8.’/0(12)7)+094.6+>?=,$%%#!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!并联机床的运动仿真和运动学正解计算陈修龙赵永生(燕山大学机械工程学院秦皇岛%""%%#)摘要提出一种用6;
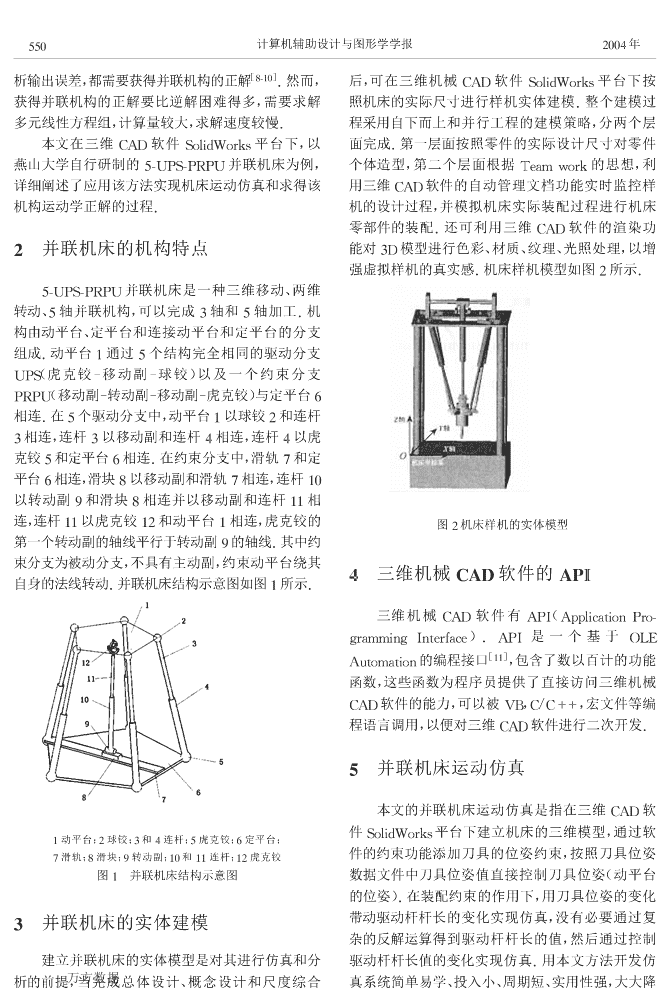
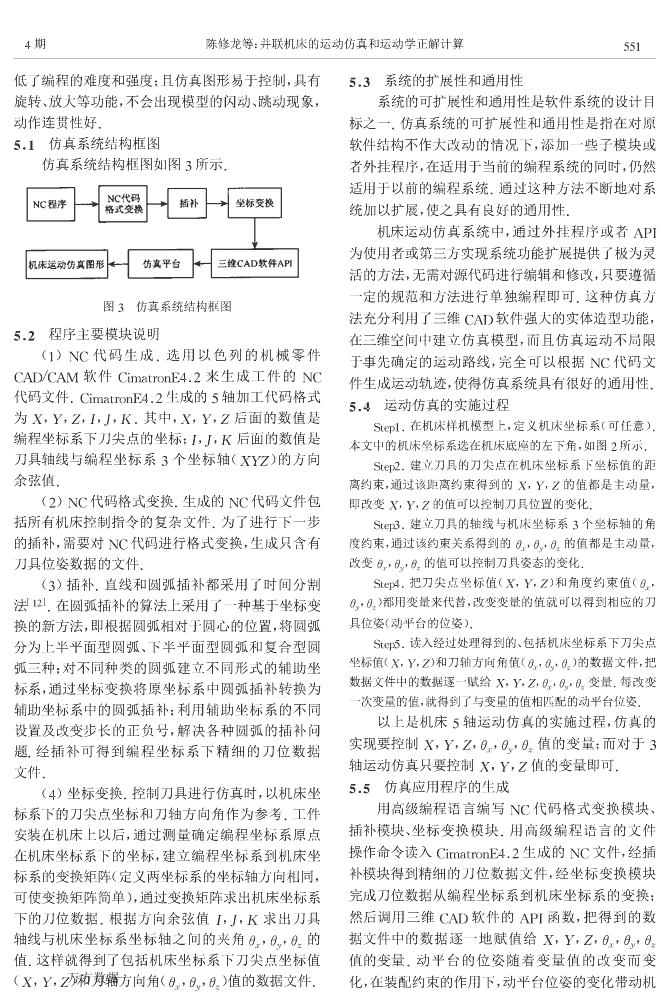
>?;QTJ;UNIELO6;Q?Q<?KIKLVKF=/04."-+2>Q?Q<JET.+5软件可以完成这些工作并联机床是机器人和机床技术相结合的产6ZIVKX),4352+6,+5+/6等=但这些大型软件价物[!],它具有高速度、高加速度、高精度、高柔性、高格昂贵,对硬件配置要求高,且难以满足复杂轨迹仿灵活性、大推力以及重量轻等优点,具有广阔的发展真要求=北京理工大学、东北大学已开发出了具有和应用前景[$],自$%世纪A%年代中期问世以来,不一定实用性的并联机构运动仿真系统,但均采用过数年时间,便以迅猛的速度向前发展[@]=:.[[编程语言,利用’>KL7,图形库实现三维实机器人运动仿真涉及机器人机构学、运动学、零体模拟图形的显示[#,"],这需要较高的编程技术和件建模和运动控制,是一项综合性的、有创新意义和较大的投入,生成的仿真结果也难以使人满意;特别实用价值的研究课题[#]是图形复杂时,图形的显示速度和动画连续性较差,=运动仿真技术可应用于机床设计与研究的许多方面:为机床结构方案设计提并且要编写并联机构的运动学逆解模块,工作量供参考依据;帮助研究人员了解机床工作空间的形很大=态与极限;分析检验轨迹规划和作业规划的正确性并联机构运动学正解是根据并联机构驱动杆长与合理性;为离线编程技术的研究提供一种有效的来推算动平台的位置和姿态[D],是并联机构应用的基验证手段;实时检测机器人与作业环境之间的碰撞础,因而倍受关注=用最小的机构尺寸获得必需的工与干涉,保证整个生产单元的安全,等等=此外,还作空间、避开机构运动的奇异位置、校对机器零位、分原稿收到日期:$%%@3%@3!%;修改稿收到日期:$%%@3%A3$$=本课题得到河北省自然科学基金(B%@$CD)和河北省博士基金($%%!$!")资助=陈修龙,男,!AD"年生,博士研究生,主要研究方向为.+5/.+/、数控技术=赵永生,男,!A"$年生,博士,教授,博士生导师,主要研究方向为机器人技术、并万方数据联机床及其数控系统=\n22$计算机辅助设计与图形学学报9$$:年析输出误差,都需要获得并联机构的正解[!"#$]后,可在三维机械&’(软件)*+,-.*/01平台下按%然而,获得并联机构的正解要比逆解困难得多,需要求解照机床的实际尺寸进行样机实体建模%整个建模过多元线性方程组,计算量较大,求解速度较慢%程采用自下而上和并行工程的建模策略,分两个层本文在三维&’(软件)*+,-.*/01平台下,以面完成%第一层面按照零件的实际设计尺寸对零件燕山大学自行研制的2"34)"4543并联机床为例,个体造型,第二个层面根据=>?@A*/0的思想,利详细阐述了应用该方法实现机床运动仿真和求得该用三维&’(软件的自动管理文档功能实时监控样机构运动学正解的过程%机的设计过程,并模拟机床实际装配过程进行机床零部件的装配%还可利用三维&’(软件的渲染功!并联机床的机构特点能对6(模型进行色彩、材质、纹理、光照处理,以增强虚拟样机的真实感%机床样机模型如图9所示%2"34)"4543并联机床是一种三维移动、两维转动、2轴并联机构,可以完成6轴和2轴加工%机构由动平台、定平台和连接动平台和定平台的分支组成%动平台#通过2个结构完全相同的驱动分支34)(虎克铰7移动副7球铰)以及一个约束分支4543(移动副7转动副7移动副7虎克铰)与定平台8相连%在2个驱动分支中,动平台#以球铰9和连杆6相连,连杆6以移动副和连杆:相连,连杆:以虎克铰2和定平台8相连%在约束分支中,滑轨;和定平台8相连,滑块!以移动副和滑轨;相连,连杆#$以转动副<和滑块!相连并以移动副和连杆##相连,连杆##以虎克铰#9和动平台#相连,虎克铰的图9机床样机的实体模型第一个转动副的轴线平行于转动副<的轴线%其中约束分支为被动分支,不具有主动副,约束动平台绕其#三维机械$%&软件的%’(自身的法线转动%并联机床结构示意图如图#所示%三维机械&’(软件有’4B(’CC+,D?E,*F4/*"G/?@@,FGBFE>/H?D>)%’4B是一个基于IJK[##],包含了数以百计的功能’LE*@?E,*F的编程接口函数,这些函数为程序员提供了直接访问三维机械&’(软件的能力,可以被MN,&/&OO,宏文件等编程语言调用,以便对三维&’(软件进行二次开发%)并联机床运动仿真本文的并联机床运动仿真是指在三维&’(软件)*+,-.*/01平台下建立机床的三维模型,通过软#动平台;9球铰;6和:连杆;2虎克铰;8定平台;件的约束功能添加刀具的位姿约束,按照刀具位姿;滑轨;!滑块;<转动副;#$和##连杆;#9虎克铰图#并联机床结构示意图数据文件中刀具位姿值直接控制刀具位姿(动平台的位姿)%在装配约束的作用下,用刀具位姿的变化带动驱动杆杆长的变化实现仿真,没有必要通过复"并联机床的实体建模杂的反解运算得到驱动杆杆长的值,然后通过控制建立并联机床的实体模型是对其进行仿真和分驱动杆杆长值的变化实现仿真%用本文方法开发仿析的前提,当完成总体设计、概念设计和尺度综合万方数据真系统简单易学、投入小、周期短、实用性强,大大降\n1期陈修龙等:并联机床的运动仿真和运动学正解计算33#低了编程的难度和强度;且仿真图形易于控制,具有!"%系统的扩展性和通用性旋转、放大等功能,不会出现模型的闪动、跳动现象,系统的可扩展性和通用性是软件系统的设计目动作连贯性好!标之一!仿真系统的可扩展性和通用性是指在对原!"#仿真系统结构框图软件结构不作大改动的情况下,添加一些子模块或仿真系统结构框图如图"所示!者外挂程序,在适用于当前的编程系统的同时,仍然适用于以前的编程系统!通过这种方法不断地对系统加以扩展,使之具有良好的通用性!机床运动仿真系统中,通过外挂程序或者&45为使用者或第三方实现系统功能扩展提供了极为灵活的方法,无需对源代码进行编辑和修改,只要遵循一定的规范和方法进行单独编程即可!这种仿真方图"仿真系统结构框图法充分利用了三维%&’软件强大的实体造型功能,!"$程序主要模块说明在三维空间中建立仿真模型,而且仿真运动不局限(#)$%代码生成!选用以色列的机械零件于事先确定的运动路线,完全可以根据$%代码文%&’/%&(软件%)*+,-./01!2来生成工件的$%件生成运动轨迹,使得仿真系统具有很好的通用性!代码文件!%)*+,-./01!2生成的3轴加工代码格式!"&运动仿真的实施过程为!,",#,$,%,&!其中,!,",#后面的数值是6,78#!在机床样机模型上,定义机床坐标系(可任意)!编程坐标系下刀尖点的坐标;$,%,&后面的数值是本文中的机床坐标系选在机床底座的左下角,如图2所示!刀具轴线与编程坐标系"个坐标轴(!"#)的方向6,782!建立刀具的刀尖点在机床坐标系下坐标值的距余弦值!离约束,通过该距离约束得到的!,",#的值都是主动量,(2)$%代码格式变换!生成的$%代码文件包即改变!,",#的值可以控制刀具位置的变化!括所有机床控制指令的复杂文件!为了进行下一步6,78"!建立刀具的轴线与机床坐标系"个坐标轴的角的插补,需要对$%代码进行格式变换,生成只含有度约束,通过该约束关系得到的!,!,!的值都是主动量,’()刀具位姿数据的文件!改变!’,!(,!)的值可以控制刀具姿态的变化!(")插补!直线和圆弧插补都采用了时间分割6,781!把刀尖点坐标值(!,",#)和角度约束值(!’,法[#2]!,!))都用变量来代替,改变变量的值就可以得到相应的刀!在圆弧插补的算法上采用了一种基于坐标变(换的新方法,即根据圆弧相对于圆心的位置,将圆弧具位姿(动平台的位姿)!分为上半平面型圆弧、下半平面型圆弧和复合型圆6,783!读入经过处理得到的、包括机床坐标系下刀尖点坐标值(!,",#)和刀轴方向角值(!,!,!)的数据文件,把弧三种;对不同种类的圆弧建立不同形式的辅助坐’()数据文件中的数据逐一赋给!,",#,!,!,!变量!每改变标系,通过坐标变换将原坐标系中圆弧插补转换为’()一次变量的值,就得到了与变量的值相匹配的动平台位姿!辅助坐标系中的圆弧插补;利用辅助坐标系的不同以上是机床3轴运动仿真的实施过程,仿真的设置及改变步长的正负号,解决各种圆弧的插补问实现要控制!,",#,!,!,!值的变量;而对于"题!经插补可得到编程坐标系下精细的刀位数据’()轴运动仿真只要控制!,",#值的变量即可!文件!(1)坐标变换!控制刀具进行仿真时,以机床坐!"!仿真应用程序的生成用高级编程语言编写$%代码格式变换模块、标系下的刀尖点坐标和刀轴方向角作为参考!工件安装在机床上以后,通过测量确定编程坐标系原点插补模块、坐标变换模块!用高级编程语言的文件在机床坐标系下的坐标,建立编程坐标系到机床坐操作命令读入%)*+,-./01!2生成的$%文件,经插标系的变换矩阵(定义两坐标系的坐标轴方向相同,补模块得到精细的刀位数据文件,经坐标变换模块可使变换矩阵简单),通过变换矩阵求出机床坐标系完成刀位数据从编程坐标系到机床坐标系的变换;下的刀位数据!根据方向余弦值$,%,&求出刀具然后调用三维%&’软件的&45函数,把得到的数轴线与机床坐标系坐标轴之间的夹角!,!,!的据文件中的数据逐一地赋值给!,",#,!,!,!’()’()值!这样就得到了包括机床坐标系下刀尖点坐标值值的变量!动平台的位姿随着变量值的改变而变(!,",#万方数据)和刀轴方向角(!’,!,!))值的数据文件!化,在装配约束的作用下,动平台位姿的变化带动机(\n%%;计算机辅助设计与图形学学报;>>$年床驱动杆杆长的变化,完成了用刀具位姿数据直接可以应用该方法求得并联机构的正解,但该方法只控制刀具运动,实现机床的运动仿真!适用于正解存在且惟一的机构!本文方法的原理如!"#仿真实例图%所示!通过并联机床运动仿真系统操作界面可以完成对加工刀具的定义、仿真"#文件的选择、仿真速度的控制、加工控制(对刀、刀具归位、运动仿真、停止仿真),并且具有数据显示(刀头位置显示、刀具姿态显示、驱动杆长度显示)、仿真速度显示、仿真所用刀具显示的功能!并联机床加工(沿螺旋线)过程某瞬图%本文方法的原理时状态的仿真主界面如图$所示!并联机构运动学正解的一般数值解法是建立机构的运动学正解数学模型,求解数学模型得到正解!单纯比较求解数学模型的时间与用本文方法得到正解的时间,相差是有限的!但从总体上看,本文方法避免了建立运动学正解数学模型的步骤和其他的计算,可随着驱动杆杆长值的变化实时地显示刀具位姿的值,所以比一般数值解法的速度要快!#")运动学正解计算的实施过程(定坐标系下))789:!在机床样机模型上,定义机床坐标系(可任意)!本文中的机床坐标系选在机床底座的左下角!由机床坐标系原点的位置和坐标轴方向可知,刀尖点的坐标始终为正值!图$仿真主界面)789;!标注刀具的刀尖点在机床坐标系下的距离尺寸!,",#(刀尖点在机床坐标系下的坐标值)!标注得到的距#!$%&’$&(&%并联机构的运动学正解离尺寸是从动量,即!,",#的值随着刀具位姿的变化而变化!由于刀具位姿变化是根据驱动杆杆长的变化而变化的,本文的%&’()&(*(’并联机构的运动学正解因此!,",#的值随着驱动杆杆长的变化而相应地变化!是在三维#+,软件)-./01-234平台下建立机床的)7895!标注刀具轴线与机床坐标系5个坐标轴的角度三维模型,标注刀尖点在机床坐标系下坐标值的距!$,!%,!&(机床坐标系下刀具的方向角)!标注得到的角度值是从动量,即!,!,!的值随着刀具位姿的变化而变化!由$%&离尺寸(!,",#)和刀具轴线与机床坐标系5个坐于刀具位姿变化是根据驱动杆杆长的变化而变化的,因此标轴之间的角度(!,!,!),改变机床%个驱动杆$%&!$,!,!的值也随着驱动杆杆长的变化而相应地变化!%&的杆长值!在装配约束的作用下,刀具位姿便随着)789$!读入驱动杆的杆长数据文件,调用三维#+,软机床%个驱动杆杆长值的变化而变化,刀具位姿的件的对象(+(<函数)把各个驱动杆伸长到规定的值!在装配变化使得!,",#,!,!,!的值发生相应的变化,约束的作用下,杆长数据的变化带动刀具位姿变化,刀具位$%&即!,",#,6-4!$,6-4!,6-4!&的值(机床坐标系下姿的改变带动从动尺寸!,",#,!$,!%,!&值的变化!%刀具的位姿)发生相应的变化!通过改变驱动杆杆)789%!输出!,",#,6-4!$,6-4!%,6-4!&的值,完成机床坐标系下%&’()&(*(’并联机构的运动学正解计算!长得到机床坐标系下相应的刀具位姿,实现了机床)789=!建立机床坐标系和定坐标系的旋转变换矩阵,把坐标系下机构的运动学正解计算!机床坐标系下的!,",#,6-4!,6-4!,6-4!的值变换到定$%&本文方法降低了求解并联机构正解的难度,可坐标系下相应的值,完成定坐标系下%&’()&(*(’并联机实现任意坐标系下并联机构的运动学正解计算!只构的位置正解计算!要知道任意坐标系和机床坐标系之间的旋转变换矩#"*正解应用程序的生成阵,把机床坐标系下!,",#,6-4!$,6-4!%,6-4!&的首先编写高级编程语言与三维#+,软件+(<值变换到任意坐标系下相应的值即可!该方法是一函数的通信模块;然后利用高级编程语言编写文件种跨#+,万方数据平台的技术,即其他的三维#+,软件也读入模块,实现对驱动杆杆长数据文件的读入;最后\n)期陈修龙等:并联机床的运动仿真和运动学正解计算**(利用高级编程语言编写文件输出模块,实现输出不表$驱动杆杆长数据’’同驱动杆杆长时!,",#,!"#!$,!"#!%,!"#!&的值,’%’&’(’)’*并生成包含!,",#,!"#!$,!"#!%,!"#!&值的数据%)&+$,-,%),,$,.%%(,,$,+,%)/,$,//%)(,$,+,文件,得到机床坐标系下正解应用程序$例如,求定%)&($,-%%)%-$(*%%)&,$.+,%)&)$%(*%)&%$-.)坐标系下正解应用程序要用高级编程语言编写数学%)*-$&*,%(*+$&/&%**,$/,%%)(($.-,%*)/$--%计算(旋转变换矩阵)模块,由计算模块得出定坐标%)**$,/,%*.,$+*%%((+$.%,%*/.$&+-%(..$*+.系下刀具位姿的值$%)**$.%,%()&$%*%%*++$-&,%(-*$/))%*/&$+,(!"#实例%/,%$%&&%(.)$*)(%/%.$--/%&+/$)*+%),)$%&,表%所示为驱动杆杆长数据;由杆长数据得到%(,/$.+(%(,%$%%&%)/+$&%)%)..$+.+%/)/$,(,的定坐标系下的刀具位姿如表&所示$表%刀具位姿数据’’!"#()*,$**&+,/*,$./.%*.&,$),+.+((0,$&,,.,(0,$.*,&&.,$).//%,,$+*.*%&.,$+(()--%,$%-%&,*-0,$--)(,%0,$,--+.%,$,(+*&.&,$-/...+-,$.,/.%-(,$%.&(,--0,$./%*&%0,$,).&(&0,$*,*)&*,$(.--+&%,$+*(&)/.,$&%-*),(0,$+/,)/%0,$&--&/&,$*+/(,++%$,/-/--,$+**,-*%,$&%%*&,$.&+-(,*,$,),(,/0,$**-(.,.%$%((*%&,$)&&,%.+,$).*/%(),$/*&++/)0,$(.%..)0,$/*)&*&%$,-+*-+%$,(-+--,$(-.-/-,$/)((+(%),$)%//,))0,$/)&&+,!"&正确性验证用123软件得到并联机构的位置正解是借助参考文献三维123软件所具有的尺寸驱动功能来记录刀具位姿的值,从理论上分析是可行的$根据表&中刀[%]:;<=>?<#"<=,@A;<=B?;<$7;C;DDED’;!F?]$1F?<;LE!F;]$中国机械工程,%---,%,(%,):%%,(!%%,+)[&]NF"AO;?$1""IEC;G?"]$1F?<;LE!F;]$中国机台,所开发的仿真系统具有简单易学、投入小、开发械工程,%--.,-(():%/!%.)周期短、实用性强等特点$模块化、面向对象的编程[(]8FE<=NF"<=R?,@A;<=:E?,8F?>?;#FA<,+,-’$*5;Q?#方法使该系统不仅具有良好的可扩展性和通用性,!""IEC;G?"]$>"AC<;D"H4"CGFE;#GEC<6]$东北大学学报,&,,%,&&(/):&.&!&.))的干涉检查提供了很好的方法$而且本文采用一种[)]TAUAV?<,:;<=S?’?<,1;?WA;<=R?$9E;D?X;G?"<;]$9"Y"GBE!F]$机器人技术与应用,要的实用万方数据价值$&,,%(/):%*!%.)\n!!E计算机辅助设计与图形学学报DPPE年[!]"#$%&,’()*+,-./(0123/45#23$0(126)6748(92#32002)*[X]YG6$.,@02T(A/K-@76:U(:A()A:/L/:#/A2#<0(;/3/)1()(0O#2#$#2)*2#63/1:2;<:6=/;126)[>]-?63<$1/:8@2A/A5/#2*)-BCC4,67(F85ZR<(:(00/03()2<$0(16:[>]-V/;G()2#3()AV(;G2)/D!(E):DB!!DDE,G/6:O,BCCE,DC(B):BB!!DDE[F]52)*"6)*#G/)*,+()*52G$(,&2$"$202)-H2)/3(12;[C]+/)R@-52#<0(;/3/)1()(0O#2#671G/F8FY1/U(:1<0(176:3#23$0(126)36A/02)*()A21#23<0/3/)1(126)2)IHJ8KL(:2(M0/83/;G()2#3#[>]-V/;G()2#3()AV(;G2)/,G/6:O,BCCE,DC(9/#N?3(;G2)/1660[>]->6$:)(067I/2=2)*K)#121$1/67(E):!EQ!!!Q,/;G)606*O,DPPB,DB(E):E4E!E4C(2)?G2)/#/)[BP]N2/0#/)>,.61GI-Y60L2)*1G/2)<$1/6$1<$1<:6M0/376:<0()(:(丁洪生,王迪华,刘惠林-IHJ8B型变轴数控机床运动学仿3/;G()2#3[>]->6$:)(067V/;G()2;(05/#2*)(@YVW),BCCC,真建模及实现[>]-北京理工大学学报,DPPB,DB(E):E4E!BDB(D):DPF!DBBE4C)[BB]WA/:+W,5/#2*)36A/02)*(A/#2*)#;2/);/(<<:6(;G[>]-[Q]+/)R$’(),&2()*?G6)**(6,&2(6S2TG/)*-,G/76:U(:A>6$:)(067W)*2)//:2)*5/#2*),BCCX,C(E):4!4!4QBA2#<0(;/3/)1()(0O#2#67<(:(00/0:6M612;3/;G()2#3#[>]-?G2)([BD]&2I6,?(2[$()*\2,Y$)’2]-V/;G()2;(0W)*2)//:,BCCC(X):4!E(2)?G2)/#/)?G2)/#/)(文福安,梁崇高,廖启征-并联机器人机构位置正解[>]-中(李波,蔡光起,孙奕澎-圆弧插补新算法[>]-机械工程国机械工程,BCCC,BP(C):BPBB!BPB4)师,BCCC(X):4!E)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!第!届全国虚拟现实与可视化学术会议(""#$#’%&&!)征文通知(DPPE年X月B!4日,大连)征文范围(包括但不限于)虚拟现实技术虚拟现实应用可视化技术与应用其他相关技术建模技术(几何,行为)数字城市/建筑漫游体绘制技术仿真技术&Z5/几何压缩].游戏/数字娱乐图像分割多通道用户界面实时图形绘制虚拟设计/制造三维重建].中的心理学基于图像的绘制虚拟商场/产品展示基于+WI的可视化空间化声音交互技术和设备遥操作应用协同可视化多媒体技术].系统结构虚拟企业与社区数字人体动画技术分布/协同式虚拟环境各类模拟器基于图像的可视化数字媒体处理混合现实/增强现实人工生命虚拟手术/远程手术人机工效智能虚拟环境虚拟教育/培训各种可视化应用系统地理信息系统重要日期征文截止日期:DPPE年!月B日(收到日期)录用通知日期:DPPE年F月B日(发出日期)最终版论文日期:DPPE年F月BP日(收到日期)说明:由于本次会议的优秀论文将由《系统仿真学报》以正刊出版,请作者注意征文截止日期-会议网址G11<://UUU^A03$^/A$^;)/;;L:LDPPE文章投稿联系方式通信地址:大连市大连海事大学航海动态仿真及控制交通部重点实验室(或大连海事大学航海技术研究所)邮编:BBFPDF联系人:马烈,解翠电话(:PEBB)EQDCF!B电子邮件:3(02/"A03$^/A$^;)万方数据\n并联机床的运动仿真和运动学正解计算作者:陈修龙,赵永生作者单位:燕山大学机械工程学院,秦皇岛,066004刊名:计算机辅助设计与图形学学报英文刊名:JOURNALOFCOMPUTER-AIDEDDESIGN&COMPUTERGRAPHICS年,卷(期):2004,16(4)被引用次数:5次参考文献(12条)1.丁洪生;王迪华;刘惠林BKX-I型变轴数控机床运动学仿真建模及实现[期刊论文]-北京理工大学学报2001(04)2.HsuPL;YangWTRealtime3Dsimulationof3-axismillingusingisometricprojection1993(04)3.付玉锦;王希民;蔡光起基于3-PTT型并联机器人的计算机动态仿真系统的研究与实现[期刊论文]-机器人技术与应用2001(06)4.盛忠起;黄炜;施家顺DSX5-70型虚拟轴机床五轴联动控制[期刊论文]-东北大学学报(自然科学版)2001(03)5.周凯虚拟轴数控机床的虚实映射联动控制[期刊论文]-中国机械工程1998(03)6.汪劲松;黄田机床行业面临的机遇与挑战19997.NielsenJ;RothBSolvingtheinput/outputproblemforplanarmechanism[外文期刊]1999(02)8.WenFADisplacementanalysisofthe6-6Stewartplatformmechanisms1994(04)9.ShouR;AlizadeIAforwardandreversedisplacementanalysisofa6-DOFparallelmanipulator1994(01)10.文福安;梁崇高;廖启征并联机器人机构位置正解[期刊论文]-中国机械工程1999(09)11.李波;蔡光起;孙奕澎圆弧插补新算法[期刊论文]-机械工程师1999(08)12.EDERWEDesignmodelingadesignscienceapproach1998(04)引证文献(5条)1.鲜鸿雄.李绣峰.邓锦炽.林燕虹并联运动机床现状与关键技术研究综述[期刊论文]-机床与液压2010(1)2.陈修龙.赵永生并联机床运动仿真与运动学分析的新方法[期刊论文]-中国机械工程2006(5)3.陈修龙面向并联机床数控编程技术的研究[学位论文]博士20054.戴田国3-RRR并联机构虚拟样机设计与仿真[学位论文]硕士20055.钱俊兰四自由度并联机构的运动学分析和仿真[学位论文]硕士2005本文链接:http://d.g.wanfangdata.com.cn/Periodical_jsjfzsjytxxxb200404029.aspx