- 2022-09-27 发布 |
- 37.5 KB |
- 7页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
mecanum四轮系统全方位运动特性
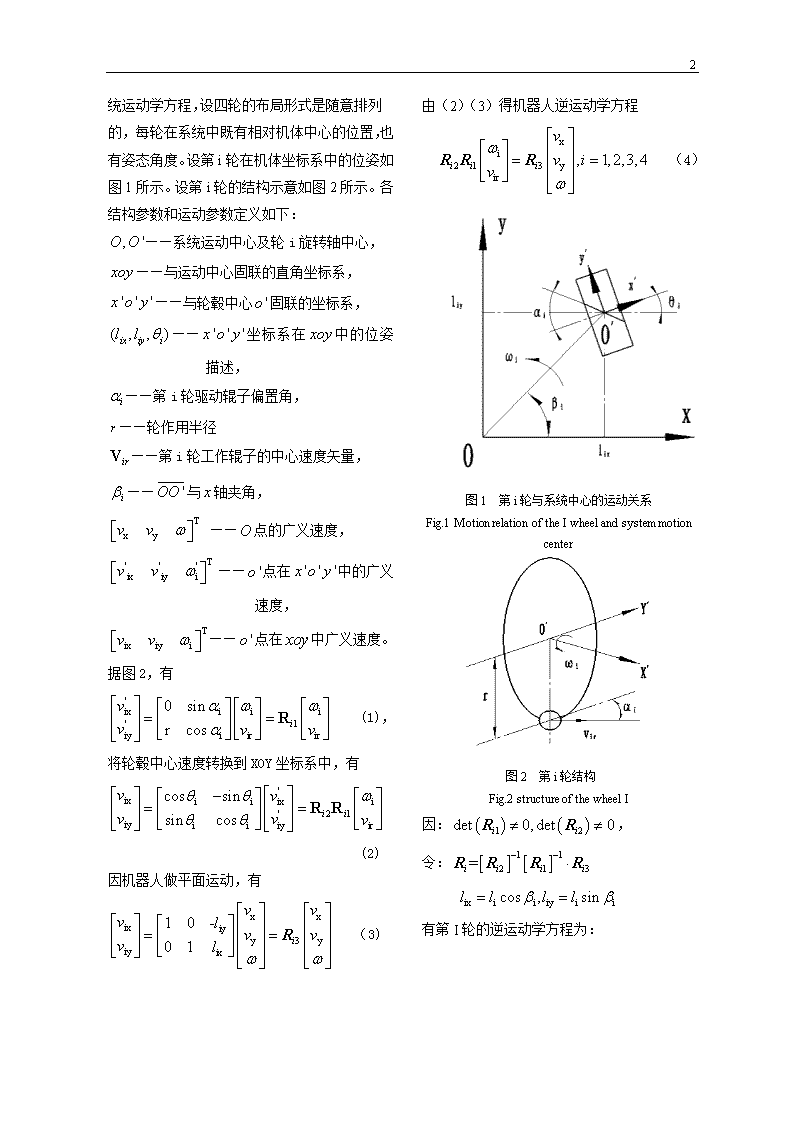
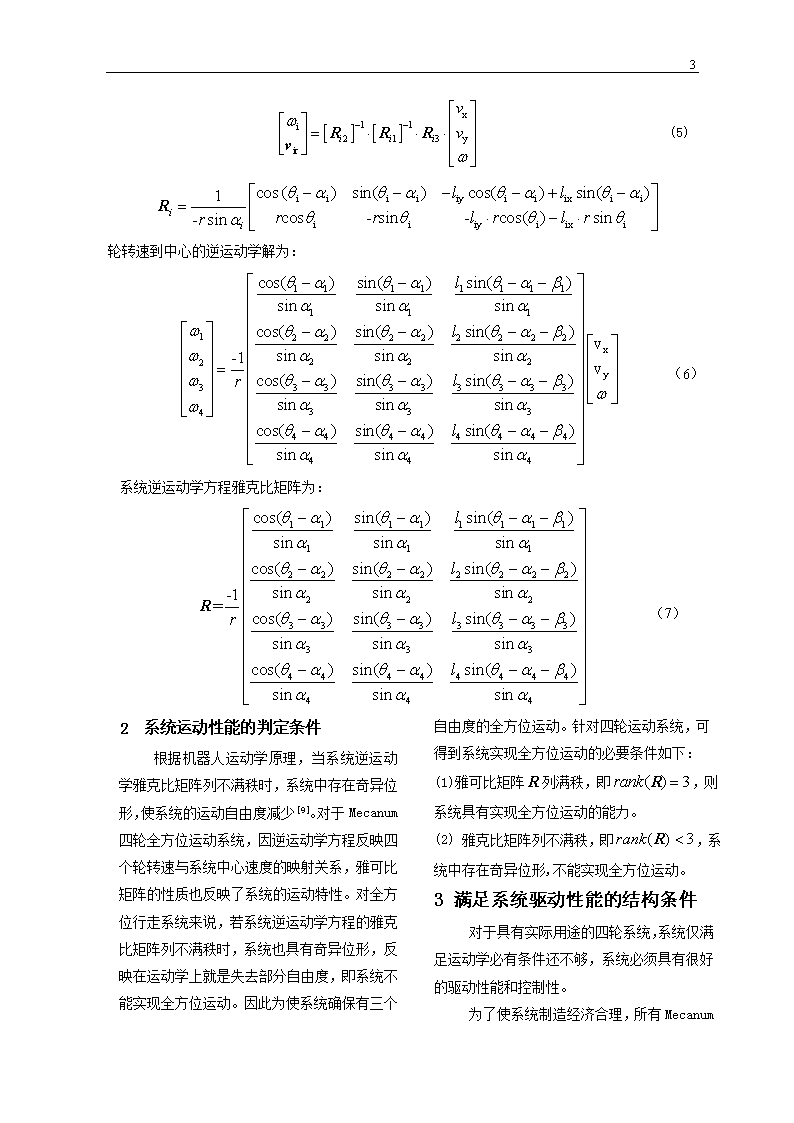
7Mecanum四轮系统全方位运动特性及布局结构优选王一治(上海大学机械电子工程与自动化学院,上海200072)摘要:四轮Mecanum系统实现全方位运动的性能很大程度上取决于轮组布局结构。通过对Mecanum四轮全方位运动系统运动学解析,得到判定系统布局结构形式优劣的必要条件,再结合系统驱动性能分析,比较选择出常见6种布局结构中最优的结构形式。关键词:Mecanum轮;运动特性;驱动性能;结构布局形式选择中图分类号:MotionCharacteristicsandconfigurationchoiceforMecanumwheeledmotionsystemwithFourWheelsWANGYizhi.(SchoolofMechanicalandElectronicsEngineeringandAutomation,ShanghaiUniversity,Shanghai,200072)Abstract:TheMecanumwheeledmotionsystemwithfourwheelsmovesinOmni-directionsquitedependonitslay-outconfiguration.Byanalysisitsmotioncharacteristic,thenecessaryconditionsofittomoveinOmni-directionsisabstractedandpresented,thencoalescentitsdrivingcapability,theoptimizationoneischooseoutfromsixtypicalconfigurations.Keywords:Mecanumwheel;motioncharacteristics;drivingcapability;configurationchoice7引言全方位运动系统具有平面上3自由度的全向运动能力,因而机动性好[1,2,3]。这种运动学上的优点使其在狭窄空间作业的机器人运动系统中广有应用。如在家居环境、车站、机场、会展大厅等结构化环境中使用的导游导购机器人运动系统中应用较多。全方位运动系统以Mecanum全方位轮(Omni-directionalwheel)研究最多[1~8]。全方位运动系统就轮结构布局形式而言,因四轮结构支撑稳定可靠,每个轮的负载比较均匀,运动稳定性好,控制简单,实际应用最为广泛[5~8]。由于Mecanum轮结构和运动学的特殊性,四轮系统中并不是任一种轮组排列结构形式都可实现全方位运动,多轮构成的系统运动能力和运动控制性能及其驱动性能均与轮组的结构形式密切相关。常见几种轮结构布局形式是否都能实现全方位运动,且运动和驱动性能如何等问题仍然需要研究分析。本文对上述两个问题进行了初步的研究探索,其结论有助于设计和应用mecanum轮系统,并有助于推进全方位系统的实际应用。1系统运动学解析为了得到一般情况下的\n7四轮全方位系统运动学方程,设四轮的布局形式是随意排列的,每轮在系统中既有相对机体中心的位置,也有姿态角度。设第i轮在机体坐标系中的位姿如图1所示。设第i轮的结构示意如图2所示。各结构参数和运动参数定义如下:——系统运动中心及轮i旋转轴中心,——与运动中心固联的直角坐标系,——与轮毂中心固联的坐标系,——坐标系在中的位姿描述,——第i轮驱动辊子偏置角,——轮作用半径——第i轮工作辊子的中心速度矢量,——与轴夹角,——点的广义速度,——点在中的广义速度,——点在中广义速度。据图2,有(1),将轮毂中心速度转换到XOY坐标系中,有(2)因机器人做平面运动,有(3)由(2)(3)得机器人逆运动学方程(4)图1第i轮与系统中心的运动关系Fig.1MotionrelationoftheIwheelandsystemmotioncenter图2第i轮结构Fig.2structureofthewheelI因:,令:有第I轮的逆运动学方程为:\n7(5)7轮转速到中心的逆运动学解为:(6)系统逆运动学方程雅克比矩阵为:(7)72系统运动性能的判定条件根据机器人运动学原理,当系统逆运动学雅克比矩阵列不满秩时,系统中存在奇异位形,使系统的运动自由度减少[9]。对于Mecanum四轮全方位运动系统,因逆运动学方程反映四个轮转速与系统中心速度的映射关系,雅可比矩阵的性质也反映了系统的运动特性。对全方位行走系统来说,若系统逆运动学方程的雅克比矩阵列不满秩时,系统也具有奇异位形,反映在运动学上就是失去部分自由度,即系统不能实现全方位运动。因此为使系统确保有三个自由度的全方位运动。针对四轮运动系统,可得到系统实现全方位运动的必要条件如下:(1)雅可比矩阵列满秩,即,则系统具有实现全方位运动的能力。(2)雅克比矩阵列不满秩,即,系统中存在奇异位形,不能实现全方位运动。3满足系统驱动性能的结构条件对于具有实际用途的四轮系统,系统仅满足运动学必有条件还不够,系统必须具有很好的驱动性能和控制性。为了使系统制造经济合理,所有\n7Mecanum轮的辊子偏置角取相同的数值,且将轮结构对称设计,安装时只要采用正反安装法,就可得到实际上的大小相等而方向相反的两种辊子偏置角。另外,为实现各轮的载荷均匀,系统的支撑结构稳定,一般常采取四个轮子关于车体几何中心(坐标系)对称布置的轮结构布局形式。即使这样规定,但四轮系统的布局结构仍然有许多种组合形式。各种形式中驱动性能有很大的区别。因Mecanum轮全方位系统在某些运动方向上存在欠驱动是其自身的特点,系统驱动性能的好坏的设计原则是:(1)在三个自由度方向上,若系统的四个轮都是驱动轮则驱动性能良好。(2)即使有欠驱动,欠驱动的方向应处于次要的运动方向上。4系统布局结构形式选择4.1六种典型四轮系统结构形式图3列举出六种典型的具有代表性的轮组结构布局方式,图中标号1、2、3、4的方框表示四个轮子,方框中斜线表示各轮接触地面时棍子偏置角方向(在俯视图上接触地面的辊子方向与轮子上表面的棍子方向相反)。6种布局下的结构参数及相应的逆运动学雅可比矩阵的秩数值计算列于表1。4.2运动学特性选择系统结构形式的优选首先看是否能满足全方位运动的必有条件。从表1知:六种结构中只有图3(a),图3(b)、图3(d)三种结构形式的逆运动学雅可比矩阵的秩rank()=3,也就是列满秩,存在广义逆阵。其它3种结构形式的雅可比矩阵均不满秩,因此系统中必存在奇异位形,因而在某些方向上不能实现运动,也即是不能实现全方位运动。另外从矩阵不满秩的3种情况可以观察出其共同特点是:轮子上辊子的方向都是同向安装的,很显然系统不能实现平面三自由度全方位运动,必有条件同实际相符。4.3驱动性能选择对上述满足系统运动学必有条件的三种结构形式再结合系统驱动性能选择说明如下:图3(a)布局结构形式中,当四个轮呈正方形布局,且辊子偏置角全部取时,则系统失去了定轴旋转能力。原因是在正方形布局结构形式下,因四个轮的速度方向与运动中心共线,无论各轮的速度大小如何改变,都不能实现绕点的旋转运动。因而系统不能实现全方位运动。也就是说这种布局结构虽然系统逆运动学雅克比矩阵的秩,列满秩,但仍然具有局限性。因而不是最优结构。图3(d)的四轮布局结构形式,虽然能实现全方位运动,但从系统驱动性能方面考虑,效果较差一些,当实现方向的运动时,必有两轮作为驱动,其余两个轮处于与地面的滑动摩擦状态,显然对系统的运动起到了阻碍作用,使得系统的驱动效果较差。如系统要沿方向运动时,只有轮1,2是驱动轮,轮3,4必须处于零转速,滑动摩擦状态。沿轴运动时,轮运动状态正好相反。综合运动可行性及系统驱动性能,最好的四轮结构布局形式是图3(b)的结构形式。图3(b)的结构形式实现全方位运动的原理如图4所示。由图4显然可见系统能实现方向的直线运动,也能实现绕中心点的定点旋转。三个方向的运动中,系统所有轮都是驱动轮。\n7系统不仅能实现全方位运动,且驱动性能较好,是最优结构布局形式。7图3六种典型Mecanum四轮结构布局形式Fig.3Sixtypicallay-outconfigurationsoftheMecanumwheeledsystem表1六种典型结构形式结构参数与值Tab.1ParametersoftheSixtypicallay-outconfigurationsand结构形式各轮的结构参数及值rank()adefβ1β2β3β40°0°0°0°α-αα-α3β1β2β3β40°0°0°0°-αα-αα3β1β2β3β40°0°0°0°-α-α-α-α290°180°270°0°90°0°90°0°αα-α-α390°180°270°0°90°0°90°0°-αα-αα2β1β2β3β445°-45°45°-45°α-αα-α2注:表中为注明具体角度值的可取任意锐角值,结果不变。\n7图4图3(b)结构形式的全方位运动图解Fig.4IllustratetheOmni-directionalmotionforconfigurationasFig.3(b)75结论:(1)四轮Mecanum全方位运动系统的轮组布局形式多种多样,并不是每一种布局形式都能实现全方位运动,判定系统实现全方位运动性能优劣的必要条件是:系统逆运动学雅克比矩阵是否列满秩。满足必要条件后还必须根据系统的驱动性能综合优选其结构布局形式。(2)从运动性能和驱动性能两方面综合选择,六种常见的布局结构形式中最优的布局结构形式如图3(b)所示。(3)Mecanum轮结构特点决定了Mecanum轮系统具有上述的特殊运动性能和结构特征。上述结论对设计和应用Mecanum全方位系统有一定指导意义。参考文献:[1]JorgeAngeles,宋伟刚译.机器人机械系统原理理论、方法和算法[M].机械工业出版社,2004.08:255-262[2]龚振帮,钱晋武.机器人机械设计.电子工业出版社,1995.02:128-136[3]蔡自兴.机器人学[M].清华大学出版社,2000.06:102-130[3]JefriEfendiMohdSalih,MohamedRizon,SazaliYaacob,etal.DesigningOmni-DirectionalMobileRobotwithMecanumWheel[J].AmericanJournalofAppliedSciences,2006,3(5):1831-1835.[4]Fiegel,O.,A.BadveandG.Bright,etal.,.Improvedmecanumwheeldesignforomnidirectionalrobots[A].Proc.AustralasianConf.RoboticsandAutomation,2002,27-29Nov.,pp:117-121.[5].M.-J.Jung,H.-S.Kim,etal.OmnidirectionalMobileBaseOK-II[A].Proc.IEEEInt.Conf.RoboticsandAutomation.(2000)Vol.4,pp.3449–3454.[6]LiZhenboandZhangChen.GeneticAlgorithmsfortheOptimalDesignofElectromagneticMicroMotors[J].\n7HighTechnologyLetter6,2000,No.1,pp.50–54.[7]Samani,A.H.,Abdollahi,A.,Ostadi,etal.DesignandDevelopmentofaComprehensiveOmnidirectionalSoccerPlayerRobot[A],pp.191-200,InternationalJournalofAdvancedRoboticSystems,Volume1,Number3(2004),ISSN1729-8806.[8]Phillips,J.G.,2000.Mechatronicdesignandconstructionofanintelligentmobilerobotforeducationalpurposes.MasterofTechnologyThesis,MasseyUniversity,PalmerstonNorth,NewZealand,pp:150.[9]熊有伦.机器人技术基础[M].武汉,华中科技大学出版社,1996:16-25__________作者简介:王一治(1966-),男,博士研究生,高级工程师。主要研究领域为智能机械系统及机器人技术。Email:wyz@shu.edu.cn查看更多