- 2022-09-27 发布 |
- 37.5 KB |
- 15页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
运动控制系统课程设计:双闭环调速系统调节器设计及matlab仿真验证
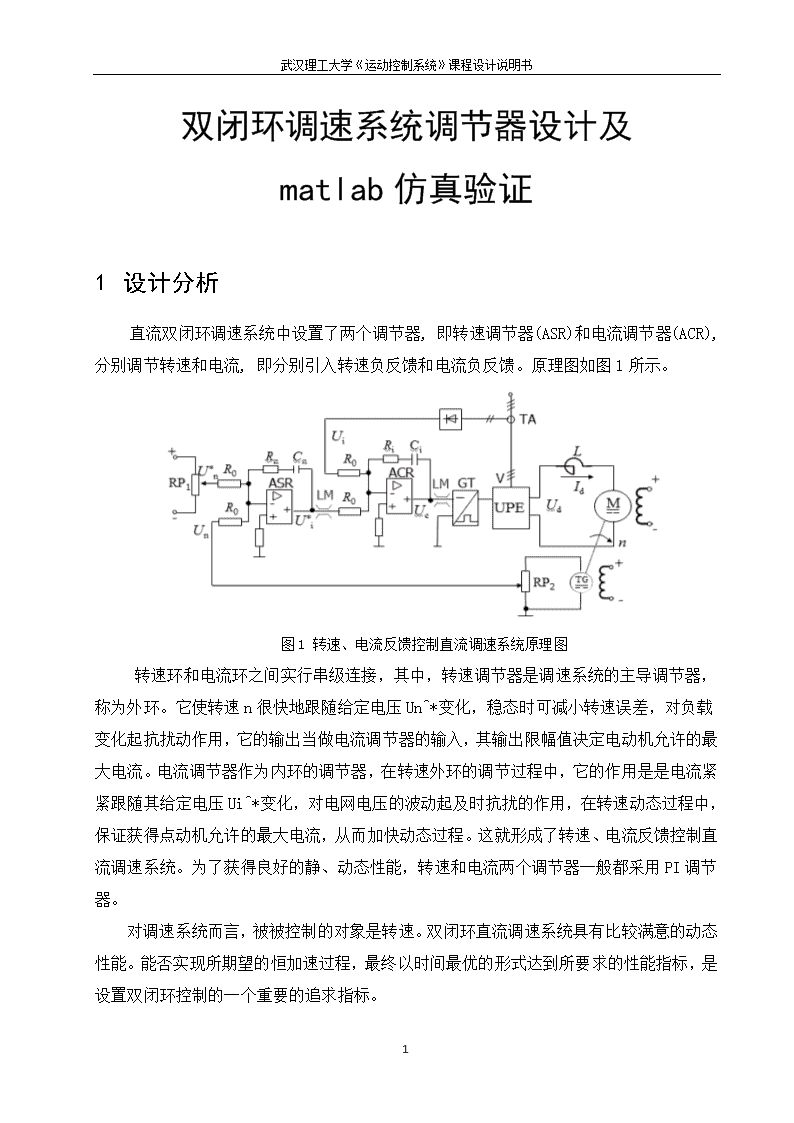
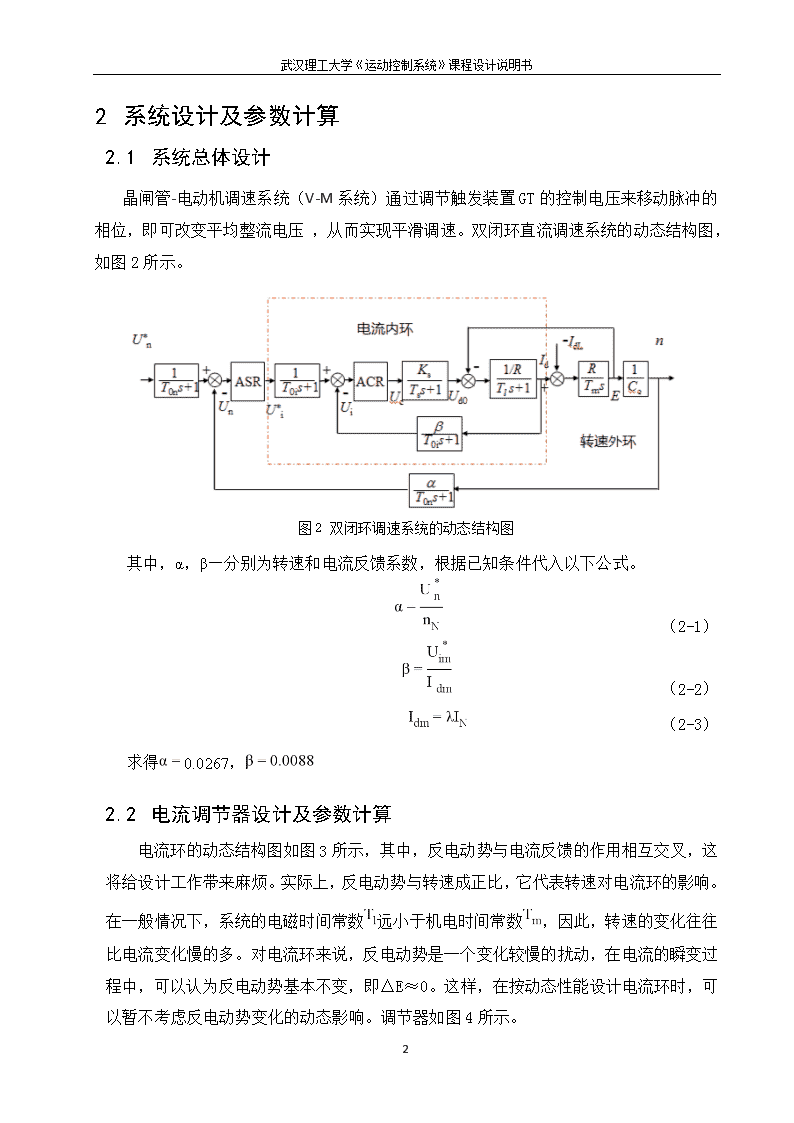
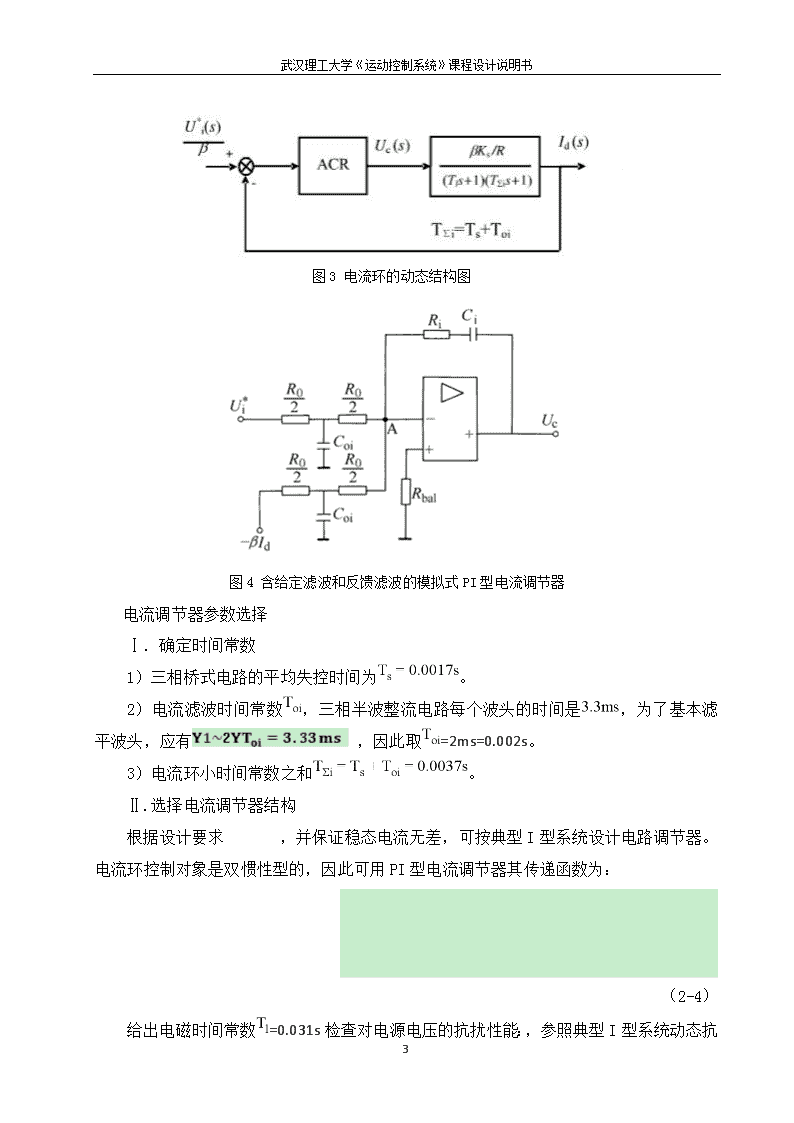
武汉理工大学《运动控制系统》课程设计说明书双闭环调速系统调节器设计及matlab仿真验证1设计分析直流双闭环调速系统中设置了两个调节器,即转速调节器(ASR)和电流调节器(ACR),分别调节转速和电流,即分别引入转速负反馈和电流负反馈。原理图如图1所示。图1转速、电流反馈控制直流调速系统原理图转速环和电流环之间实行串级连接,其中,转速调节器是调速系统的主导调节器,称为外环。它使转速n很快地跟随给定电压Un^*变化,稳态时可减小转速误差,对负载变化起抗扰动作用,它的输出当做电流调节器的输入,其输出限幅值决定电动机允许的最大电流。电流调节器作为内环的调节器,在转速外环的调节过程中,它的作用是是电流紧紧跟随其给定电压Ui^*变化,对电网电压的波动起及时抗扰的作用,在转速动态过程中,保证获得点动机允许的最大电流,从而加快动态过程。这就形成了转速、电流反馈控制直流调速系统。为了获得良好的静、动态性能,转速和电流两个调节器一般都采用PI调节器。对调速系统而言,被被控制的对象是转速。双闭环直流调速系统具有比较满意的动态性能。能否实现所期望的恒加速过程,最终以时间最优的形式达到所要求的性能指标,是设置双闭环控制的一个重要的追求指标。15\n武汉理工大学《运动控制系统》课程设计说明书1系统设计及参数计算1.1系统总体设计晶闸管-电动机调速系统(V-M系统)通过调节触发装置GT的控制电压来移动脉冲的相位,即可改变平均整流电压,从而实现平滑调速。双闭环直流调速系统的动态结构图,如图2所示。图2双闭环调速系统的动态结构图其中,α,β—分别为转速和电流反馈系数,根据已知条件代入以下公式。(2-1)(2-2)(2-3)求得0.0267,1.2电流调节器设计及参数计算电流环的动态结构图如图3所示,其中,反电动势与电流反馈的作用相互交叉,这将给设计工作带来麻烦。实际上,反电动势与转速成正比,它代表转速对电流环的影响。在一般情况下,系统的电磁时间常数远小于机电时间常数,因此,转速的变化往往比电流变化慢的多。对电流环来说,反电动势是一个变化较慢的扰动,在电流的瞬变过程中,可以认为反电动势基本不变,即△E≈0。这样,在按动态性能设计电流环时,可以暂不考虑反电动势变化的动态影响。调节器如图4所示。15\n武汉理工大学《运动控制系统》课程设计说明书图3电流环的动态结构图图4含给定滤波和反馈滤波的模拟式PI型电流调节器电流调节器参数选择Ⅰ.确定时间常数1)三相桥式电路的平均失控时间为。2)电流滤波时间常数,三相半波整流电路每个波头的时间是,为了基本滤平波头,应有,因此取=2ms=0.002s。3)电流环小时间常数之和。Ⅱ.选择电流调节器结构根据设计要求,并保证稳态电流无差,可按典型I型系统设计电路调节器。电流环控制对象是双惯性型的,因此可用PI型电流调节器其传递函数为:(2-4)给出电磁时间常数=0.031s检查对电源电压的抗扰性能:,参照典型I15\n武汉理工大学《运动控制系统》课程设计说明书型系统动态抗扰性能指标与参数的关系表格,可知各项指标都是可以接受的。电流环开环传递函数为:(2-5)因为,所以选择,用调节器零点消去控制对象中大的时间常数点,以便矫正成典型I型系统,因此(2-6)Ⅲ.计算电流调节器参数电流调节器超前时间常数:。电流环开环增益:要求时,并结合本题实际,取,因此(2-7)ACR的比例系数为(2-8)Ⅳ.检验近似条件电流环截至频率:1)校验晶闸管整流装置传递函数的近似条件(2-9)满足近似条件2)校验忽略反电动势变化对电流环动态影响的条件(2-10)满足近似条件3)校验电流环小时间常数近似处理条件15\n武汉理工大学《运动控制系统》课程设计说明书(2-11)满足近似条件Ⅴ.计算调节器电阻和电容由图5,按所用运算放大器取,各电阻和电容值计算如下:,取(2-12),取(2-13),取(2-14)按照上述参数,将在matlab仿真模型中设置,电流环可以达到的动态跟随性能指标,满足设计要求。1.1转速调节器设计及参数计算设计转速调节器时,把电流环等效为单位负反馈系统和小惯性系统。把电流环的等效环节接入转速环后,整个转速控制系统的动态结构框图如图5所示。和电流环中一样,把转速给定滤波和反馈滤波环节移到环内,同时将给定信号改成,再把时间常数为和的两个小惯性环节合并起来,近似成一个时间常数为的惯性环节。由于需要实现转速无静差,而且在后面已经有一个积分环节,因此转速环开环传递函数应共有两个积分环节,所以应该设计成典型Ⅱ型系统,这样的系统同时也能满足动态抗扰性能好的要求。由此可见,ASR也应该采用PI调节器,其传递函数为(2-15)图5用等效环节代替电流环15\n武汉理工大学《运动控制系统》课程设计说明书为了实现转速无静差,在负载扰动作用点前面必须有一个积分环节,它应该包含在转速调节器ASR中,由于在扰动作用点后面已经有了一个积分环节,因此转速开环传递函数共有两个积分环节,应该设计成典型Ⅱ型系统。图6校正后成为典型Ⅱ型系统转速调节器参数计算、选择:Ⅰ.确定时间常数1)电流环等效时间常数,已取2)转速滤波时间常数。取3)转速环小时间常数。按小时间常数近似处理,取Ⅱ.选择转速调节器结构按照设计要求,选用PI调节器,其传递函数为(2-16)调速系统开环传递函数为(2-17)另转速开环增益为(2-18)15\n武汉理工大学《运动控制系统》课程设计说明书则(2-19)为校正后的典型的Ⅱ型系统Ⅲ.计算转速调节器参数按跟随和抗扰性能都较好的原则,取,则ASR的超前时间常数为(2-20)转速开环增益(2-21)ASR的比例系数为(2-22)Ⅳ.检验近似条件转速环截止频率(2-23)1)电流环传递函数简化条件为(2-24)满足简化条件。2)转速环小时间常数近似处理条件为(2-25)满足简化条件。Ⅴ.计算调节器电阻和电容取,则,取(2-26),取(2-27),取(2-28)Ⅵ.校核转速超调量15\n武汉理工大学《运动控制系统》课程设计说明书当h=5时,,不能满足设计要求。应按ASR退饱和的情况重新计算超调量。Ⅷ.按ASR退饱和重新计算超调量过载倍数λ=1.5(2-29)Z为负载系数,;∆为调速系统开环机械特性的额定稳态速降(2-30)(2-31)求得结果,并在matlab仿真计算,在所得波形图中进行计算,得到超调量,可以得到动态超调量能满足设计要求。当超调不符合时,可以根据具体的情况,采用经验试凑法,选择在符合超调内的数据,工程法来设计的原则一般都是先内环后外环,其中有对一些变换的近似处理。1仿真分析根据上面计算的参数数据,可以用matlab的Simulink建模仿真,仿真模型如图7所示:15\n武汉理工大学《运动控制系统》课程设计说明书图7双闭环调速系统仿真模型空载启动到额定转速,可以用一个阶跃进行仿真,steptime设置成1.5,initialvalue设置为0,finalvalue设置成760,相当于1.5秒之前是空载,1.5秒之后是额定满载。当稳定运行时电流环突然断线,在模型中等效为电流反馈突然减为零,如图所示,可以在电流反馈通道上用阶跃和电流反馈信号相乘,3秒之后,阶跃由1变为0,电流反馈就变为零,相当于电流环突然断线。电流、转速仿真结果如图8所示,空载启动,1.5秒时加上额定负载电流,3秒时电流环突然断线,得到仿真波形图。图8电流、转速仿真波形图15\n武汉理工大学《运动控制系统》课程设计说明书图9电流波形整体图图10转速波形整体图其中,电流波形图如图9,转速波形图如图10。由波形图可以求出电流超调量为4.72%,小于5%;转速超调量为6.64%,小于10%,均符合动态指标,并且稳态无静差。直流电压,ASR、ACR输出电压波形图如图11、图12、图13所示。15\n武汉理工大学《运动控制系统》课程设计说明书图11直流电压波形图图12ASR输出电压波形图15\n武汉理工大学《运动控制系统》课程设计说明书图13ACR输出电压波形图电动机启动时常有空载启动与满载启动之分,两种启动情况下的电流和转速波形略有不同。空载启动时电流及转速的波形见下图。图14空载启动波形图15\n武汉理工大学《运动控制系统》课程设计说明书满载启动时电流及转速的波形见下图。图15满载启动波形图由上述波形可看出,空载时,电流从零增长到,然后在一段时间内维持不变,后又降到零,这是因为空载时没有加负载电流,故启动后稳定值为零;而满载时,电流也是从零增长到,然后在一段时间内维持不变,但最后会降到一稳定值,而该稳定值正好是满载时所加的额定负载电流。转速波形则大体相同,先是缓慢升速,然后恒加速上升至最大值,一个超调后稳定在额定转速上。从启动所需时间来看,空载启动比满载启动快一点。从电流与转速变化过程所反映出的特点可以把起动过程分为电流上升、恒流升速和转速调节三个阶段,由图12和13还可得出转速调节器在此三个阶段中经历了不饱和、饱和及退饱和三种情况,而电流调节器在整个过程中一直处于不饱和状态。分析电流环断线对系统的影响事可以参考图8至图13,从这几幅图的波形可以看出,电流环突然断线后,电流和转速都会发生振荡,且是幅值增大后的等幅振荡,系统的稳定性降低。而调节器的输出电压也都受到了限幅器的限制,即调节器都达到了饱和状态。这是由于断线的电流环属于内环反馈通道上的干扰,双闭环调速系统虽然有反馈控制,但它所能抑制的只是被反馈环所包围的前向通道上的扰动,对反馈通道上的干扰则无能为力。但是由于仿真时转速调节器和电流调节器的输出都加有限幅器,故其输出不可能一直增大,调节器会因为输出达到限幅器的限幅值而进入饱和状态,从而使电流和转速等幅振荡。15\n武汉理工大学《运动控制系统》课程设计说明书1课程设计心得体会通过本次课程设计,让我受益匪浅。首先我学会很多新的东西,对MATLAB的使用,较之以前有了更多更全面的认识。其次,我对之前学的双闭环调速系统有了更深刻的认识和理解,对一些理论知识的实际运用有了更深的理解,虽说这次设计并不算是多么的困难,但在仿真调试时也遇到了一些棘手的问题,经过多次的讨论、研究、查阅资料,以及和老师探讨,最终解决了各种问题,顺利的完成了调试。这种经历确实能让我们养成一种不断探索的科学研究精神,我想对于工科学生这个是很重要的。第三,锻炼了独立思考的能力,对运控知识的综合运用和MATLAB的应用有了深层的理解,同时锻炼了查阅资料和手册的能力。15\n武汉理工大学《运动控制系统》课程设计说明书每一次的实践课学习都是在给我们将来积累经验,锻炼自主学习,独立思考,综合运用所学知识的能力,让我们学以致用。参考文献[1]陈伯时.运动控制系统(第4版).北京:机械工业出版社,2009[2]王兆安.电力电子技术(第4版).北京:机械工业出版社,2000[3]李志民.同步电动机调速系统.北京:机械工业出版社,2006[4]郑恩让.控制系统仿真.北京:中国林业出版社,2006[5]郑阿奇.MATLAB实用教程.北京:电子工业出版社,200415查看更多