- 2022-09-27 发布 |
- 37.5 KB |
- 3页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
双轴微机械陀螺仪的移动机器人运动检测系统
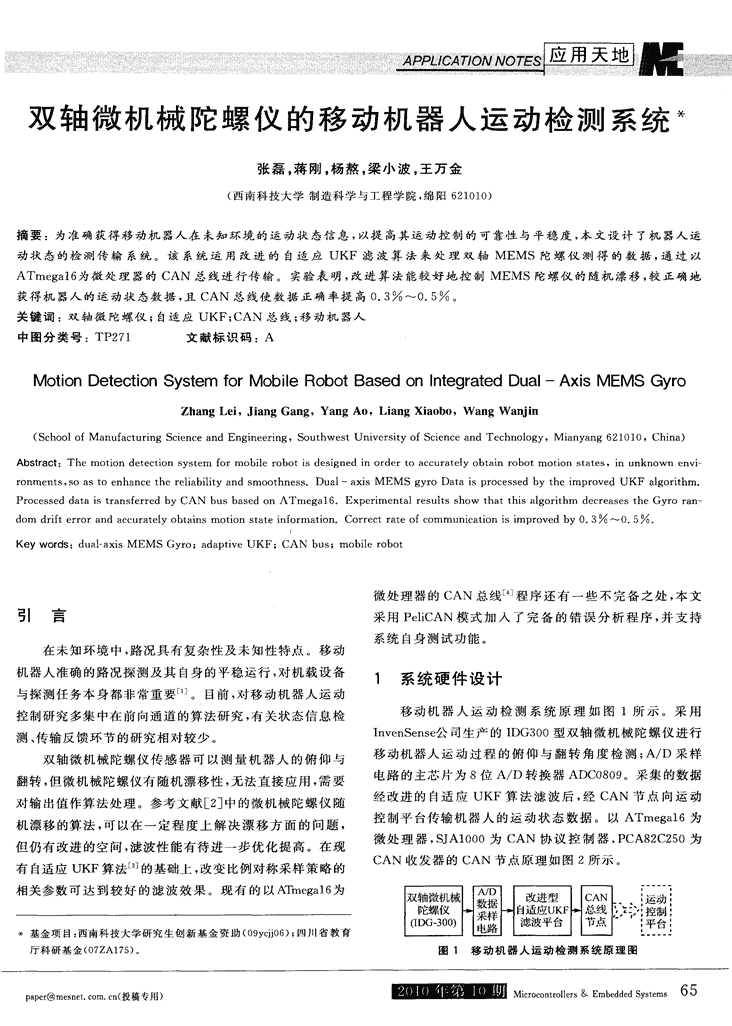
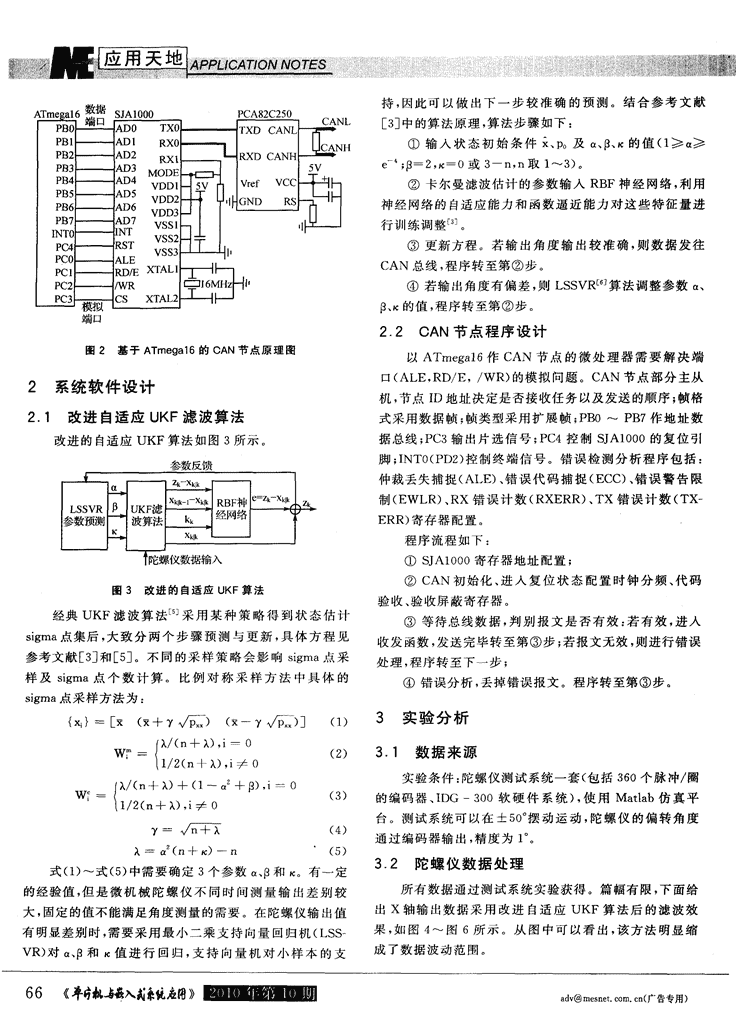
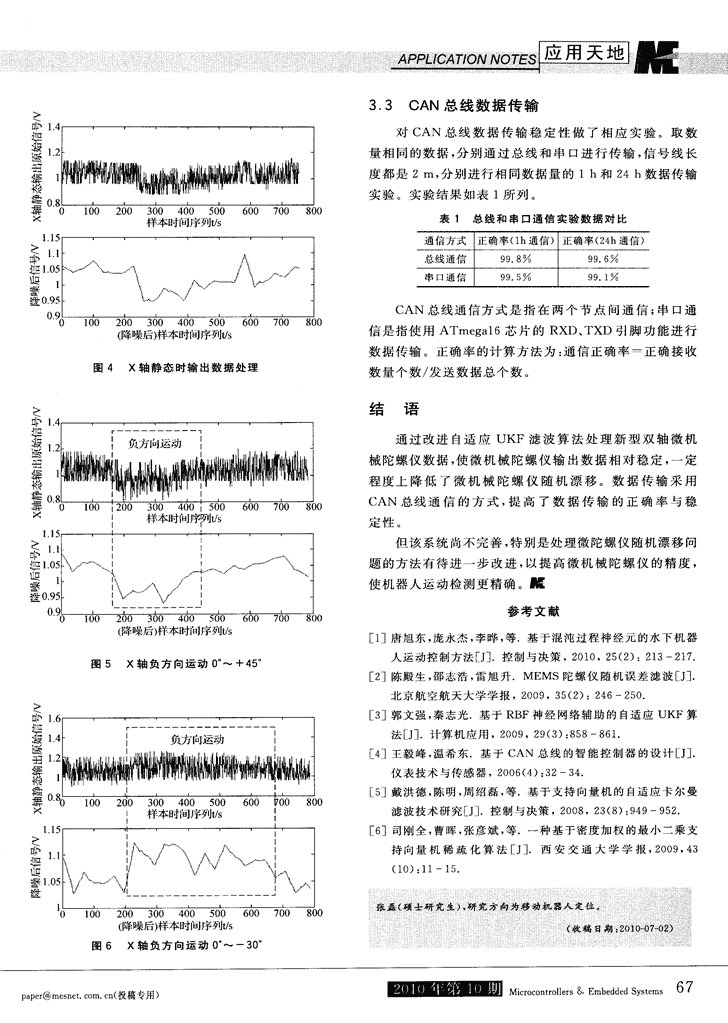
双轴微机械陀螺仪的移动机器人运动检测系统*张磊,蒋刚。杨熬,梁小波,王万金(西南科技大学制造科学与工程学院,绵阳621010)摘要:为准确获得移动机器人在未知环境的运动状态信息,以提高其运动控制的可靠性与平稳度,本文设计了机器人运动状态的检测传输系统。该系统运用改进的自适应UKF滤波算法来处理双轴MEMS陀螺仪测得的数据,通过以ATmegal6为微处理器的cAN总线进行传输。实验表明,改进算法能较好地控制MEMS陀螺仪的随机漂移,较正确地获得机器人的运动状态数据,且CAN总线使数据正确率提高0.3~0.5。关键词:双轴微陀螺仪;自适应UKF;CAN总线;移动机器人中图分类号:TP271文献标识码:AMotionDetectionSystemforMobileRobotBasedonIntegratedDual——AxisMEMSGyroZhangLei,JiangGang,YangAo,LiangXiaobo,WangWanjin(SchoolofManufacturingScienceandEngineering,SouthwestUniversityofScienceandTechnology,Mianyang621010,China)Abstract:Themotiondetectionsystemformobilerobotisdesignedinordertoaccuratelyobtainrobotmotionstates,inunknownenvironraents,SOastoenhancethereliabilityandsmoothness.Dual—axisMEMSgyroDataisprocessedbytheimprovedUKFalgorithm.ProcesseddataistransferredbyCANbusbasedonATmegal6.ExperimentalresultsshowthatthisalgorithmdecreasestheGyrorandomdrifterrorandaccuratelyobtainsmotionstateinformation.Correctrateofcommunicationisimprovedby0.3~O.5.Keywords:dual—axisMEMSGyro;adaptiveUKF;CANbus;mobilerobot微处理器的CAN总线程序还有一些不完备之处,本文引言采用PelicAN模式加入了完备的错误分析程序,并支持系统自身测试功能。在未知环境中,路况具有复杂性及未知性特点。移动机器人准确的路况探测及其自身的平稳运行,对机载设备1系统硬件设计与探测任务本身都非常重要⋯。目前,对移动机器人运动移动机器人运动检测系统原理如图1所示。采用控制研究多集中在前向通道的算法研究,有关状态信息检测、传输反馈环节的研究相对较少。InvenSense公司生产的IDG300型双轴微机械陀螺仪进行移动机器人运动过程的俯仰与翻转角度检测;A/D采样双轴微机械陀螺仪传感器可以测量机器人的俯仰与电路的主芯片为8位A/D转换器ADC0809。采集的数据翻转,但微机械陀螺仪有随机漂移性,无法直接应用,需要经改进的自适应UKF算法滤波后,经CAN节点向运动对输出值作算法处理。参考文献E23中的微机械陀螺仪随控制平台传输机器人的运动状态数据。以ATmegal6为机漂移的算法,可以在一定程度上解决漂移方面的问题,微处理器,SJA1000为CAN协议控制器,PCA82C250为但仍有改进的空间,滤波性能有待进一步优化提高。在现CAN收发器的CAN节点原理如图2所示。有自适应UKF算法的基础上,改变比例对称采样策略的相关参数可达到较好的滤波效果。现有的以ATmegal6为鐾髑薷*基金项目:西南科技大学研究生创新基金资助(09ycjj06);四川省教育厅科研基金(07ZA175)。paper@mesnet.corn.cn(投稿专用)Micr0c。ntr。11ers8LEmbeddedSystems65\n应用天地_ll_≥持,因此可以做出下一步较准确的预测。结合参考文献PBOADOTX0TXDCANL[3]中的算法原理,算法步骤如下:PBlAD1RX0①输入状态初始条件、P。及a、B、Jc的值(1≥a≥PB2AD2RX1__RXDCANHPB35Ve~;.3—2,Jc一0或3一n,n取1~3)。—._匕=]’T+IlPB4『VrefVCC叫卜②卡尔曼滤波估计的参数输入RBF神经网络,利用PB5PB6l【-I}GNDRS卜神经网络的自适应能力和函数逼近能力对这些特征量进DPB7£—一一行训练调整f。INT0VSS一I宁IlPC4SlT③更新方程。若输出角度输出较准确,则数据发往vssII。PCOALEPC1RD/EXTAL1—上卜—]cAN总线,程序转至第②步。PC2/Ⅵ,R口6HI。④若输出角度有偏差,则LSSVR算法调整参数、PC3CSXTAL28、的值,程序转至第②步。端口2.2CAN节点程序设计图2基于ATmegal6的CAN节点原理图以ATmega16作CAN节点的微处理器需要解决端口(ALE,RD/E,/WR)的模拟问题。CAN节点部分主从2系统软件设计机,节点ID地址决定是否接收任务以及发送的顺序;帧格2.1改进自适应UKF滤波算法式采用数据帧;帧类型采用扩展帧;PB0~PB7作地址数改进的自适应UKF算法如图3所示。据总线;PC3输出片选信号;PC4控制SJAIO00的复位引脚;INT0(PD2)控制终端信号。错误检测分析程序包括:参数反馈仲裁丢失捕捉(AIE)、错误代码捕捉(ECC)、错误警告限制(EwLR)、RX错误计数(RXERR)、TX错误计数(TX-ERR)寄存器配置。程序流程如下:①SJA1000寄存器地址配置;②cAN初始化、进入复位状态配置时钟分频、代码图3改进的自适应UKF算法验收、验收屏蔽寄存器。经典UKF滤波算法采用某种策略得到状态估计③等待总线数据,判别报文是否有效:若有效,进人sigma点集后,大致分两个步骤预测与更新,具体方程见收发函数,发送完毕转至第③步;若报文无效,则进行错误参考文献E33和[5]。不同的采样策略会影响sigma点采处理,程序转至下一步;样及sigma点个数计算。比例对称采样方法中具体的④错误分析,丢掉错误报文。程序转至第③步。sigma点采样方法为:{xi)=[_爻(又+丫~/p)(爻一7~/p)](1)3实验分析,i—owW。:=』fI1/?+(2)3.1I数教据琚来米源z(n+.),i≠0⋯。一。实验条件:陀螺仪测试系统一套(包括360个脉冲/圈fx/(n+)+(1~a+8),i一0W‘一{1。(3)的编码器、IDG一300软硬件系统),使用Matlab仿真平1/2(n+),i≠0台。测试系统可以在±50。摆动运动,陀螺仪的偏转角度一再(4)通过编码器输出,精度为1。。一(n+,c)一n’(5)3.2陀螺仪数据处理式(1)~式(5)中需要确定3个参数、J3和。有一定的经验值,但是微机械陀螺仪不同时间测量输出差别较所有数据通过测试系统实验获得。篇幅有限,下面给大,固定的值不能满足角度测量的需要。在陀螺仪输出值出X轴输出数据采用改进自适应UKF算法后的滤波效有明显差别时,需要采用最小二乘支持向量回归机(LSS—果,如图4~图6所示。从图中可以看出,该方法明显缩VR)对a、p和-c值进行回归,支持向量机对小样本的支成了数据波动范围。66《车卉扯蕞入i:鑫名厢》\n/鲁旱J丑集艋暴)(人/审世3.3CAN总线数据传输对CAN总线数据传输稳定性做了相应实验。取数量相同的数据,分别通过总线和串口进行传输,信号线长度都是2m,分别进行相同数据量的1h和24h数据传输实验。实验结果如表1所列。表1总线和串口通信实验数据对比样本时问序列s通信方式正确率(1h通信)正确率(24h通信)总线通信99.8%99.6串口通信99.5%99.1CAN总线通信方式是指在两个节点问通信;串口通信是指使用ATmega16芯片的RXD、TXD引脚功能进行(降噪后)样本时间序列s数据传输。正确率的计算方法为:通信正确率一正确接收图4X轴静态时输出数据处理数量个数/发送数据总个数。之结语ⅡL、1通过改进自适应UKF滤波算法处理新型双轴微机一:负方向运动:弭械陀螺仪数据,使微机械陀螺仪输出数据相对稳定,一定程度上降低了微机械陀螺仪随机漂移。数据传输采用羹oCAN总线通信的方式,提高了数据传输的正确率与稳样本时序列s定性。之但该系统尚不完善,特别是处理微陀螺仪随机漂移问坦题的方法有待进一步改进,以提高微机械陀螺仪的精度,u晕使机器人运动检测更精确。l匿世参考文献(降噪后)样本时问序列sEli唐旭东,庞永杰,李晔,等.基于混沌过程神经元的水下机器人运动控制方法[J].控制与决策,2010,25(2):213—217.图5X轴负方向运动0。~+45。E2]陈殿生,邵志浩,雷旭升.MEMS陀螺仪随机误差滤波EJ].北京航空航天大学学报,2009,35(2):246—250.[3]郭文强,秦志光.基于RBF神经网络辅助的自适应UKF算法EJ].计算机应用,2009,29(3):858—861.[4]王毅峰,温希东.基于CAN总线的智能控制器的设计[J].仪表技术与传感器,2006(4):32—34.E5]戴洪德,陈明,周绍磊,等.基于支持向量机的自适应卡尔曼滤波技术研究EJ].控制与决策,2008,23(8):949—952.E6]司刚全,曹晖,张彦斌,等.一种基于密度加权的最小二乘支>廿持向量机稀疏化算法[J].西安交通大学学报,2009,43也(10):11—15.世曩j张磊《硕士研究生研究方向为移动机器人定德荔薯ji誊(降噪后)样本时间序列siii图6X轴负方向运动O。~一30。薯paper@mesnet.com.cn(投稿专用)Micr()c。ntro11ers&EmbeddedSyslems67查看更多