- 2022-08-16 发布 |
- 37.5 KB |
- 41页

申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
大学物理物理习题答案
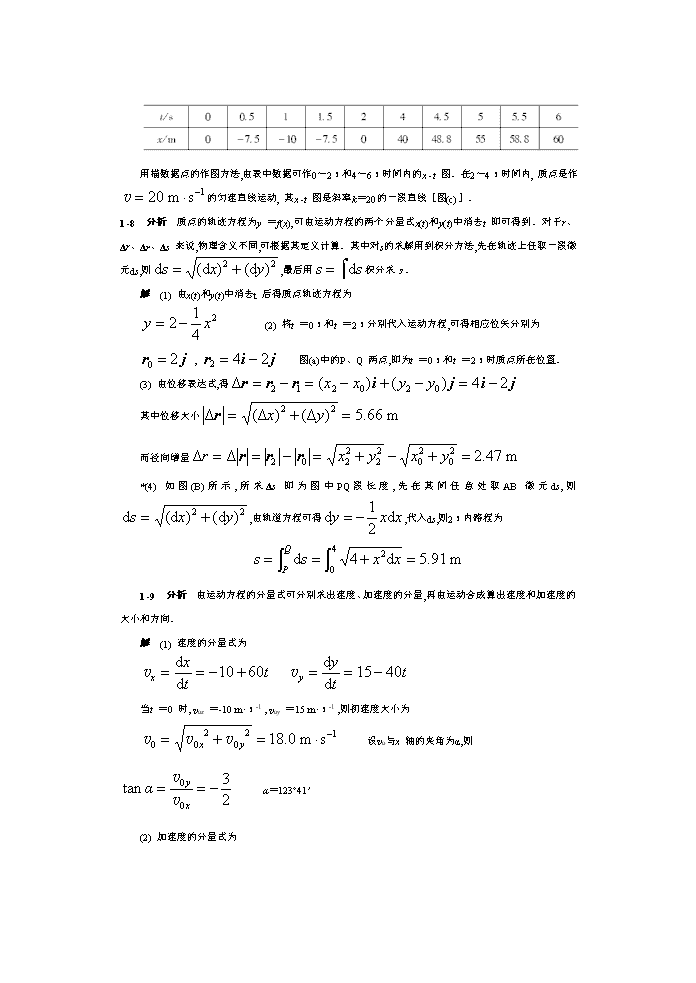
第一章 质点运动学1-1 分析与解 (1)质点在t至(t+Δt)时间内沿曲线从P点运动到P′点,各量关系如图所示,其中路程Δs=PP′,位移大小|Δr|=PP′,而Δr=|r|-|r|表示质点位矢大小的变化量,三个量的物理含义不同,在曲线运动中大小也不相等(注:在直线运动中有相等的可能).但当Δt→0时,点P′无限趋近P点,则有|dr|=ds,但却不等于dr.故选(B).(2)由于|Δr|≠Δs,故,即||≠.但由于|dr|=ds,故,即||=.由此可见,应选(C).1-2分析与解 表示质点到坐标原点的距离随时间的变化率,在极坐标系中叫径向速率.通常用符号vr表示,这是速度矢量在位矢方向上的一个分量;表示速度矢量;在自然坐标系中速度大小可用公式计算,在直角坐标系中则可由公式求解.故选(D).1-3分析与解 表示切向加速度at,它表示速度大小随时间的变化率,是加速度矢量沿速度方向的一个分量,起改变速度大小的作用;在极坐标系中表示径向速率vr(如题1-2);在自然坐标系中表示质点的速率v;而表示加速度的大小而不是切向加速度at.因此只有(3)式表达是正确的.故选(D).1-4分析与解 加速度的切向分量at起改变速度大小的作用,而法向分量an起改变速度方向的作用.质点作圆周运动时,由于速度方向不断改变,相应法向加速度的方向也在不断改变,因而法向加速度是一定改变的.至于at是否改变,则要视质点的速率情况而定.质点作匀速率圆周运动时,at恒为零;质点作匀变速率圆周运动时,at为一不为零的恒量,当at改变时,质点则作一般的变速率圆周运动.由此可见,应选(B).1-5分析与解 本题关键是先求得小船速度表达式,进而判断运动性质.为此建立坐标系,设定滑轮距水面高度为h,t时刻定滑轮距小船的绳长为l,则小船的运动方程为,其中绳长l随时间t而变化.小船速度,式中表示绳长l随时间的变化率,其大小即为v0\n,代入整理后为,方向沿x轴负向.由速度表达式,可判断小船作变加速运动.故选(C).讨论 有人会将绳子速率v0按x、y两个方向分解,则小船速度,这样做对吗?1-6分析 位移和路程是两个完全不同的概念.只有当质点作直线运动且运动方向不改变时,位移的大小才会与路程相等.质点在t时间内的位移Δx的大小可直接由运动方程得到:,而在求路程时,就必须注意到质点在运动过程中可能改变运动方向,此时,位移的大小和路程就不同了.为此,需根据来确定其运动方向改变的时刻tp,求出0~tp和tp~t内的位移大小Δx1、Δx2,则t时间内的路程,如图所示,至于t=4.0s时质点速度和加速度可用和两式计算.解 (1)质点在4.0s内位移的大小(2)由得知质点的换向时刻为(t=0不合题意)则所以,质点在4.0s时间间隔内的路程为(3)t=4.0s时1-7分析 根据加速度的定义可知,在直线运动中v-t曲线的斜率为加速度的大小(图中AB、CD段斜率为定值,即匀变速直线运动;而线段BC的斜率为0,加速度为零,即匀速直线运动).加速度为恒量,在a-t图上是平行于t轴的直线,由v-t图中求出各段的斜率,即可作出a-t图线.又由速度的定义可知,x-t曲线的斜率为速度的大小.因此,匀速直线运动所对应的x-t图应是一直线,而匀变速直线运动所对应的x–t图为t的二次曲线.根据各段时间内的运动方程x=x(t),求出不同时刻t的位置x,采用描数据点的方法,可作出x-t图.解 将曲线分为AB、BC、CD三个过程,它们对应的加速度值分别为 (匀加速直线运动) (匀速直线运动) (匀减速直线运动)根据上述结果即可作出质点的a-t图[图(B)].在匀变速直线运动中,有由此,可计算在0~2s和4~6s时间间隔内各时刻的位置分别为\n用描数据点的作图方法,由表中数据可作0~2s和4~6s时间内的x-t图.在2~4s时间内,质点是作的匀速直线运动,其x-t图是斜率k=20的一段直线[图(c)].1-8 分析 质点的轨迹方程为y=f(x),可由运动方程的两个分量式x(t)和y(t)中消去t即可得到.对于r、Δr、Δr、Δs来说,物理含义不同,可根据其定义计算.其中对s的求解用到积分方法,先在轨迹上任取一段微元ds,则,最后用积分求s.解 (1)由x(t)和y(t)中消去t后得质点轨迹方程为(2)将t=0s和t=2s分别代入运动方程,可得相应位矢分别为,图(a)中的P、Q两点,即为t=0s和t=2s时质点所在位置.(3)由位移表达式,得其中位移大小而径向增量*(4)如图(B)所示,所求Δs即为图中PQ段长度,先在其间任意处取AB微元ds,则,由轨道方程可得,代入ds,则2s内路程为1-9 分析 由运动方程的分量式可分别求出速度、加速度的分量,再由运动合成算出速度和加速度的大小和方向.解 (1)速度的分量式为当t=0时,vox=-10m·s-1,voy=15m·s-1,则初速度大小为设vo与x轴的夹角为α,则α=123°41′(2)加速度的分量式为\n,则加速度的大小为设a与x轴的夹角为β,则β=-33°41′(或326°19′)1-10 分析 在升降机与螺丝之间有相对运动的情况下,一种处理方法是取地面为参考系,分别讨论升降机竖直向上的匀加速度运动和初速不为零的螺丝的自由落体运动,列出这两种运动在同一坐标系中的运动方程y1=y1(t)和y2=y2(t),并考虑它们相遇,即位矢相同这一条件,问题即可解;另一种方法是取升降机(或螺丝)为参考系,这时,螺丝(或升降机)相对它作匀加速运动,但是,此加速度应该是相对加速度.升降机厢的高度就是螺丝(或升降机)运动的路程.解1 (1)以地面为参考系,取如图所示的坐标系,升降机与螺丝的运动方程分别为当螺丝落至底面时,有y1=y2,即(2)螺丝相对升降机外固定柱子下降的距离为解2 (1)以升降机为参考系,此时,螺丝相对它的加速度大小a′=g+a,螺丝落至底面时,有(2)由于升降机在t时间内上升的高度为则1-11 .分析 该题属于运动学的第一类问题,即已知运动方程r=r(t)求质点运动的一切信息(如位置矢量、位移、速度、加速度).在确定运动方程时,若取以点(0,3)为原点的O′x′y′坐标系,并采用参数方程x′=x′(t)和y′=y′(t)来表示圆周运动是比较方便的.然后,运用坐标变换x=x0+x′和y=y0+y′,将所得参数方程转换至Oxy坐标系中,即得Oxy坐标系中质点P在任意时刻的位矢.采用对运动方程求导的方法可得速度和加速度.解 (1)如图(B)所示,在O′x′y′坐标系中,因,则质点P的参数方程为\n, 坐标变换后,在Oxy坐标系中有, 则质点P的位矢方程为(2)5s时的速度和加速度分别为1-12 分析 为求杆顶在地面上影子速度的大小,必须建立影长与时间的函数关系,即影子端点的位矢方程.根据几何关系,影长可通过太阳光线对地转动的角速度求得.由于运动的相对性,太阳光线对地转动的角速度也就是地球自转的角速度.这样,影子端点的位矢方程和速度均可求得.解 设太阳光线对地转动的角速度为ω,从正午时分开始计时,则杆的影长为s=htgωt,下午2∶00时,杆顶在地面上影子的速度大小为当杆长等于影长时,即s=h,则即为下午3∶00时.1-13分析 本题属于运动学第二类问题,即已知加速度求速度和运动方程,必须在给定条件下用积分方法解决.由和可得和.如a=a(t)或v=v(t),则可两边直接积分.如果a或v不是时间t的显函数,则应经过诸如分离变量或变量代换等数学操作后再做积分.解 由分析知,应有得(1)由得(2)将t=3s时,x=9m,v=2m·s-1代入(1)(2)得v0=-1m·s-1,x0=0.75m.于是可得质点运动方程为1-14分析 本题亦属于运动学第二类问题,与上题不同之处在于加速度是速度v的函数,因此,需将式dv=\na(v)dt分离变量为后再两边积分.解 选取石子下落方向为y轴正向,下落起点为坐标原点.(1)由题意知(1)用分离变量法把式(1)改写为(2)将式(2)两边积分并考虑初始条得石子速度由此可知当,t→∞时,为一常量,通常称为极限速度或收尾速度.(2)由并考虑初始条件有得石子运动方程1-15分析 与上两题不同处在于质点作平面曲线运动,根据叠加原理,求解时需根据加速度的两个分量ax和ay分别积分,从而得到运动方程r的两个分量式x(t)和y(t).由于本题中质点加速度为恒矢量,故两次积分后所得运动方程为固定形式,即和,两个分运动均为匀变速直线运动.读者不妨自己验证一下.解 由加速度定义式,根据初始条件t0=0时v0=0,积分可得又由及初始条件t=0时,r0=(10m)i,积分可得由上述结果可得质点运动方程的分量式,即x=10+3t2y=2t2消去参数t,可得运动的轨迹方程3y=2x-20m这是一个直线方程.直线斜率,α=33°41′.1-16分析 瞬时加速度和平均加速度的物理含义不同,它们分别表示为和.在匀速率圆周运动中,它们的大小分别为,,式中|Δv|可由图(B)中的几何关系得到,而Δt可由转过的角度Δθ求出.由计算结果能清楚地看到两者之间的关系,即瞬时加速度是平均加速度在Δt→0时的极限值.\n解 (1)由图(b)可看到Δv=v2-v1,故而所以(2)将Δθ=90°,30°,10°,1°分别代入上式,得,,以上结果表明,当Δθ→0时,匀速率圆周运动的平均加速度趋近于一极限值,该值即为法向加速度.1-17 分析 根据运动方程可直接写出其分量式x=x(t)和y=y(t),从中消去参数t,即得质点的轨迹方程.平均速度是反映质点在一段时间内位置的变化率,即,它与时间间隔Δt的大小有关,当Δt→0时,平均速度的极限即瞬时速度.切向和法向加速度是指在自然坐标下的分矢量at和an,前者只反映质点在切线方向速度大小的变化率,即,后者只反映质点速度方向的变化,它可由总加速度a和at得到.在求得t1时刻质点的速度和法向加速度的大小后,可由公式求ρ.解 (1)由参数方程x=2.0t, y=19.0-2.0t2消去t得质点的轨迹方程:y=19.0-0.50x2(2)在t1=1.00s到t2=2.0s时间内的平均速度(3)质点在任意时刻的速度和加速度分别为则t1=1.00s时的速度v(t)|t=1s=2.0i-4.0j切向和法向加速度分别为(4)t=1.0s质点的速度大小为则\n1-18 分析 物品空投后作平抛运动.忽略空气阻力的条件下,由运动独立性原理知,物品在空中沿水平方向作匀速直线运动,在竖直方向作自由落体运动.到达地面目标时,两方向上运动时间是相同的.因此,分别列出其运动方程,运用时间相等的条件,即可求解.此外,平抛物体在运动过程中只存在竖直向下的重力加速度.为求特定时刻t时物体的切向加速度和法向加速度,只需求出该时刻它们与重力加速度之间的夹角α或β.由图可知,在特定时刻t,物体的切向加速度和水平线之间的夹角α,可由此时刻的两速度分量vx、vy求出,这样,也就可将重力加速度g的切向和法向分量求得.解 (1)取如图所示的坐标,物品下落时在水平和竖直方向的运动方程分别为x=vt, y=1/2gt2飞机水平飞行速度v=100m·s-1,飞机离地面的高度y=100m,由上述两式可得目标在飞机正下方前的距离(2)视线和水平线的夹角为(3)在任意时刻物品的速度与水平轴的夹角为取自然坐标,物品在抛出2s时,重力加速度的切向分量与法向分量为1-19 分析 这是一个斜上抛运动,看似简单,但针对题目所问,如不能灵活运用叠加原理,建立一个恰当的坐标系,将运动分解的话,求解起来并不容易.现建立如图(a)所示坐标系,则炮弹在x和y两个方向的分运动均为匀减速直线运动,其初速度分别为v0cosβ和v0sinβ,其加速度分别为gsinα和gcosα.在此坐标系中炮弹落地时,应有y=0,则x=OP.如欲使炮弹垂直击中坡面,则应满足vx=0,直接列出有关运动方程和速度方程,即可求解.由于本题中加速度g为恒矢量.故第一问也可由运动方程的矢量式计算,即,做出炮弹落地时的矢量图[如图(B)所示],由图中所示几何关系也可求得(即图中的r矢量).(1)解1 由分析知,炮弹在图(a)所示坐标系中两个分运动方程为(1)(2)令y=0求得时间t后再代入式(1)得\n解2 做出炮弹的运动矢量图,如图(b)所示,并利用正弦定理,有从中消去t后也可得到同样结果.(2)由分析知,如炮弹垂直击中坡面应满足y=0和vx=0,则(3)由(2)(3)两式消去t后得由此可知.只要角α和β满足上式,炮弹就能垂直击中坡面,而与v0的大小无关.1-20分析选定伞边缘O处的雨滴为研究对象,当伞以角速度ω旋转时,雨滴将以速度v沿切线方向飞出,并作平抛运动,建立坐标系,列出雨滴的运动方程并考虑图中所示几何关系,即可求证.由此可以想像如果让水从一个旋转的有很多小孔的喷头中飞出,从不同小孔中飞出的水滴将会落在半径不同的圆周上,为保证均匀喷洒对喷头上小孔的分布还要给予精心的考虑.解 (1),雨滴落地的运动方程为(1)(2)由式(1)(2)可得由几何关系得雨滴落地处圆周的(2)常用草坪喷水器采用如图(b)所示的球面喷头(θ0=45°)其上有大量小孔.喷头旋转时,水滴以初速度v0从各个小孔中喷出,并作斜上抛运动,通常喷头表面基本上与草坪处在同一水平面上.则以φ角喷射的水柱射程为为使喷头周围的草坪能被均匀喷洒,喷头上的小孔数不但很多,而且还不能均匀分布,这是喷头设计中的一个关键问题.1-21 分析 被踢出后的足球,在空中作斜抛运动,其轨迹方程可由质点在竖直平面内的运动方程得到.由于水平距离x已知,球门高度又限定了在y方向的范围,故只需将x、y值代入即可求出.解 取图示坐标系Oxy,由运动方程\n, 消去t得轨迹方程以x=25.0m,v=20.0m·s-1及3.44m≥y≥0代入后,可解得71.11°≥θ1≥69.92°27.92°≥θ2≥18.89°1-22分析 在自然坐标中,s表示圆周上从某一点开始的曲线坐标.由给定的运动方程s=s(t),对时间t求一阶、二阶导数,即是沿曲线运动的速度v和加速度的切向分量at,而加速度的法向分量为an=v2/R.这样,总加速度为a=atet+anen.至于质点在t时间内通过的路程,即为曲线坐标的改变量Δs=st-s0.因圆周长为2πR,质点所转过的圈数自然可求得.解 (1)质点作圆周运动的速率为其加速度的切向分量和法向分量分别为,故加速度的大小为其方向与切线之间的夹角为(2)要使|a|=b,由可得(3)从t=0开始到t=v0/b时,质点经过的路程为因此质点运行的圈数为1-23 分析 首先应该确定角速度的函数关系ω=kt2.依据角量与线量的关系由特定时刻的速度值可得相应的角速度,从而求出式中的比例系数k,ω=ω(t)确定后,注意到运动的角量描述与线量描述的相应关系,由运动学中两类问题求解的方法(微分法和积分法),即可得到特定时刻的角加速度、切向加速度和角位移.解 因ωR=v,由题意ω∝t2得比例系数所以则t′=0.5s时的角速度、角加速度和切向加速度分别为\n总加速度在2.0s内该点所转过的角度1-24 分析 掌握角量与线量、角位移方程与位矢方程的对应关系,应用运动学求解的方法即可得到.解 (1)由于,则角速度.在t=2s时,法向加速度和切向加速度的数值分别为(2)当时,有,即得此时刻的角位置为(3)要使,则有t=0.55s1-25 分析 这是一个相对运动的问题.设雨滴为研究对象,地面为静止参考系S,火车为动参考系S′.v1为S′相对S的速度,v2为雨滴相对S的速度,利用相对运动速度的关系即可解.解 以地面为参考系,火车相对地面运动的速度为v1,雨滴相对地面竖直下落的速度为v2,旅客看到雨滴下落的速度v2′为相对速度,它们之间的关系为(如图所示),于是可得1-26分析这也是一个相对运动的问题.可视雨点为研究对象,地面为静参考系S,汽车为动参考系S′.要使物体不被淋湿,在车上观察雨点下落的方向(即雨点相对于汽车的运动速度v2′的方向)应满足.再由相对速度的矢量关系,即可求出所需车速v1.解 由[图(b)],有而要使,则1-27 分析 船到达对岸所需时间是由船相对于岸的速度v决定的.由于水流速度u的存在,v与船在静水中划行的速度v′之间有v=u+v′.若要使船到达正对岸,则必须使v\n沿正对岸方向;在划速一定的条件下,若要用最短时间过河,则必须使v有极大值.解 (1)由v=u+v′可知,则船到达正对岸所需时间为(2)由于,在划速v′一定的条件下,只有当α=0时,v最大(即v=v′),此时,船过河时间t′=d/v′,船到达距正对岸为l的下游处,且有1-28分析 该问题涉及到运动的相对性.如何将已知质点相对于观察者O的运动转换到相对于观察者O′的运动中去,其实质就是进行坐标变换,将系O中一动点(x,y)变换至系O′中的点(x′,y′).由于观察者O′相对于观察者O作匀速运动,因此,该坐标变换是线性的.解 取Oxy和O′x′y′分别为观察者O和观察者O′所在的坐标系,且使Ox和O′x′两轴平行.在t=0时,两坐标原点重合.由坐标变换得x′=x-vt=vt-vt=0y′=y=1/2gt2加速度由此可见,动点相对于系O′是在y方向作匀变速直线运动.动点在两坐标系中加速度相同,这也正是伽利略变换的必然结果.第二章 牛顿定律2-1分析与解 当物体离开斜面瞬间,斜面对物体的支持力消失为零,物体在绳子拉力FT(其方向仍可认为平行于斜面)和重力作用下产生平行水平面向左的加速度a,如图(b)所示,由其可解得合外力为mgcotθ,故选(D).求解的关键是正确分析物体刚离开斜面瞬间的物体受力情况和状态特征.2-2 分析与解 与滑动摩擦力不同的是,静摩擦力可在零与最大值μFN范围内取值.当FN增加时,静摩擦力可取的最大值成正比增加,但具体大小则取决于被作用物体的运动状态.由题意知,物体一直保持静止状态,故静摩擦力与重力大小相等,方向相反,并保持不变,故选(A).2-3 分析与解 由题意知,汽车应在水平面内作匀速率圆周运动,为保证汽车转弯时不侧向打滑,所需向心力只能由路面与轮胎间的静摩擦力提供,能够提供的最大向心力应为μFN.由此可算得汽车转弯的最大速率应为v=μRg.因此只要汽车转弯时的实际速率不大于此值,均能保证不侧向打滑.应选(C).2-4 分析与解 由图可知,物体在下滑过程中受到大小和方向不变的重力以及时刻指向圆轨道中心的轨道支持力FN作用,其合外力方向并非指向圆心,其大小和方向均与物体所在位置有关.重力的切向分量(mgcosθ)使物体的速率将会不断增加(由机械能守恒亦可判断),则物体作圆周运动的向心力(又称法向力)将不断增大,由轨道法向方向上的动力学方程可判断,随θ角的不断增大过程,轨道支持力FN也将不断增大,由此可见应选(B).2-5 分析与解 本题可考虑对A、B两物体加上惯性力后,以电梯这个非惯性参考系进行求解.此时A、B\n两物体受力情况如图(b)所示,图中a′为A、B两物体相对电梯的加速度,ma′为惯性力.对A、B两物体应用牛顿第二定律,可解得FT=5/8mg.故选(A).2-6 分析 动力学问题一般分为两类:(1)已知物体受力求其运动情况;(2)已知物体的运动情况来分析其所受的力.当然,在一个具体题目中,这两类问题并无截然的界限,且都是以加速度作为中介,把动力学方程和运动学规律联系起来.本题关键在列出动力学和运动学方程后,解出倾角与时间的函数关系α=f(t),然后运用对t求极值的方法即可得出数值来.解 取沿斜面为坐标轴Ox,原点O位于斜面顶点,则由牛顿第二定律有(1)又物体在斜面上作匀变速直线运动,故有(2)为使下滑的时间最短,可令,由式(2)有则可得,此时2-7 分析 预制板、吊车框架、钢丝等可视为一组物体.处理动力学问题通常采用“隔离体”的方法,分析物体所受的各种作用力,在所选定的惯性系中列出它们各自的动力学方程.根据连接体中物体的多少可列出相应数目的方程式.结合各物体之间的相互作用和联系,可解决物体的运动或相互作用力.解 按题意,可分别取吊车(含甲、乙)和乙作为隔离体,画示力图,并取竖直向上为Oy轴正方向(如图所示).当框架以加速度a上升时,有FT-(m1+m2)g=(m1+m2)a(1)FN2-m2g=m2a(2)解上述方程,得FT=(m1+m2)(g+a)(3)FN2=m2(g+a)(4)(1)当整个装置以加速度a=10m·s-2上升时,由式(3)可得绳所受张力的值为FT=5.94×103N乙对甲的作用力为F′N2=-FN2=-m2(g+a)=-1.98×103N(2)当整个装置以加速度a=1m·s-2上升时,得绳张力的值为FT=3.24×103N此时,乙对甲的作用力则为F′N2=-1.08×103N2-8 分析 该题为连接体问题,同样可用隔离体法求解.分析时应注意到绳中张力大小处处相等是有条件的,即必须在绳的质量和伸长可忽略、滑轮与绳之间的摩擦不计的前提下成立.同时也要注意到张力方向是不同的.解 分别对物体和滑轮作受力分析[图(b)].由牛顿定律分别对物体A、B及滑轮列动力学方程,有mAg-FT=mAa(1)F′T1-Ff=mBa′(2)F′T-2FT1=0(3)\n考虑到mA=mB=m,FT=F′T,FT1=F′T1,a′=2a,可联立解得物体与桌面的摩擦力2-9 分析 当木块B平稳地轻轻放至运动着的平板A上时,木块的初速度可视为零,由于它与平板之间速度的差异而存在滑动摩擦力,该力将改变它们的运动状态.根据牛顿定律可得到它们各自相对地面的加速度.换以平板为参考系来分析,此时,木块以初速度-v′(与平板运动速率大小相等、方向相反)作匀减速运动,其加速度为相对加速度,按运动学公式即可解得.该题也可应用第三章所讲述的系统的动能定理来解.将平板与木块作为系统,该系统的动能由平板原有的动能变为木块和平板一起运动的动能,而它们的共同速度可根据动量定理求得.又因为系统内只有摩擦力作功,根据系统的动能定理,摩擦力的功应等于系统动能的增量.木块相对平板移动的距离即可求出.解1 以地面为参考系,在摩擦力Ff=μmg的作用下,根据牛顿定律分别对木块、平板列出动力学方程Ff=μmg=ma1F′f=-Ff=m′a2a1和a2分别是木块和木板相对地面参考系的加速度.若以木板为参考系,木块相对平板的加速度a=a1+a2,木块相对平板以初速度-v′作匀减速运动直至最终停止.由运动学规律有-v′2=2as由上述各式可得木块相对于平板所移动的距离为解2 以木块和平板为系统,它们之间一对摩擦力作的总功为W=Ff(s+l)-Ffl=μmgs式中l为平板相对地面移动的距离.由于系统在水平方向上不受外力,当木块放至平板上时,根据动量守恒定律,有m′v′=(m′+m)v″由系统的动能定理,有由上述各式可得2-10 分析 维持钢球在水平面内作匀角速度转动时,必须使钢球受到一与向心加速度相对应的力(向心力),而该力是由碗内壁对球的支持力FN的分力来提供的,由于支持力FN始终垂直于碗内壁,所以支持力的大小和方向是随ω而变的.取图示Oxy坐标,列出动力学方程,即可求解钢球距碗底的高度.解 取钢球为隔离体,其受力分析如图(b)所示.在图示坐标中列动力学方程(1)(2)且有(3)由上述各式可解得钢球距碗底的高度为可见,h随ω的变化而变化.2-11 分析 如题所述,外轨超高的目的欲使火车转弯的所需向心力仅由轨道支持力的水平分量FNsinθ提供(式中θ角为路面倾角).从而不会对内外轨产生挤压.与其对应的是火车转弯时必须以规定的速率v0\n行驶.当火车行驶速率v≠v0时,则会产生两种情况:如图所示,如v>v0时,外轨将会对车轮产生斜向内的侧压力F1,以补偿原向心力的不足,如v<v0时,则内轨对车轮产生斜向外的侧压力F2,以抵消多余的向心力,无论哪种情况火车都将对外轨或内轨产生挤压.由此可知,铁路部门为什么会在每个铁轨的转弯处规定时速,从而确保行车安全.解 (1)以火车为研究对象,建立如图所示坐标系.据分析,由牛顿定律有(1)(2)解(1)(2)两式可得火车转弯时规定速率为(2)当v>v0时,根据分析有(3)(4)解(3)(4)两式,可得外轨侧压力为当v<v0时,根据分析有(5)(6)解(5)(6)两式,可得内轨侧压力为2-12 分析 杂技演员(连同摩托车)的运动可以看成一个水平面内的匀速率圆周运动和一个竖直向上匀速直线运动的叠加.其旋转一周所形成的旋线轨迹展开后,相当于如图(b)所示的斜面.把演员的运动速度分解为图示的v1和v2两个分量,显然v1是竖直向上作匀速直线运动的分速度,而v2则是绕圆筒壁作水平圆周运动的分速度,其中向心力由筒壁对演员的支持力FN的水平分量FN2提供,而竖直分量FN1则与重力相平衡.如图(c)所示,其中φ角为摩托车与筒壁所夹角.运用牛顿定律即可求得筒壁支持力的大小和方向解 设杂技演员连同摩托车整体为研究对象,(1)(2)3)(4)以式(3)代入式(2)\n(5)将式(1)和式(5)代入式(4),可求出圆筒壁对杂技演员的作用力(即支承力)大小为与壁的夹角φ为2-13分析 首先应由题图求得两个时间段的F(t)函数,进而求得相应的加速度函数,运用积分方法求解题目所问,积分时应注意积分上下限的取值应与两时间段相应的时刻相对应.解:由牛顿定律可得两时间段质点的加速度分别为对0<t<5s时间段,由得积分后得再由得积分后得将t=5s代入,得v5=30m·s-1和x5=68.7m对5s<t<7s时间段,用同样方法有得再由得x=17.5t2-0.83t3-82.5t+147.87将t=7s代入分别得v7=40m·s-1和 x7=142m2-14 分析 这是在变力作用下的动力学问题.由于力是时间的函数,而加速度a=dv/dt,这时,动力学方程就成为速度对时间的一阶微分方程,解此微分方程可得质点的速度v(t);由速度的定义v=dx/dt,用积分的方法可求出质点的位置. 解 因加速度a=dv/dt,在直线运动中,根据牛顿运动定律有依据质点运动的初始条件,即t0=0时v0=6.0m·s-1,运用分离变量法对上式积分,得v=6.0+4.0t+6.0t2又因v=dx/dt,并由质点运动的初始条件:t0=0时x0=5.0m,对上式分离变量后积分,有x=5.0+6.0t+2.0t2+2.0t32-15 分析 飞机连同驾驶员在水平跑道上运动可视为质点作直线运动.其水平方向所受制动力F为变力,且是时间的函数.在求速率和距离时,可根据动力学方程和运动学规律,采用分离变量法求解.\n解 以地面飞机滑行方向为坐标正方向,由牛顿运动定律及初始条件,有得因此,飞机着陆10s后的速率为v=30m·s-1又故飞机着陆后10s内所滑行的距离2-16 分析 该题可以分为两个过程,入水前是自由落体运动,入水后,物体受重力P、浮力F和水的阻力Ff的作用,其合力是一变力,因此,物体作变加速运动.虽然物体的受力分析比较简单,但是,由于变力是速度的函数(在有些问题中变力是时间、位置的函数),对这类问题列出动力学方程并不复杂,但要从它计算出物体运动的位置和速度就比较困难了.通常需要采用积分的方法去解所列出的微分方程.这也成了解题过程中的难点.在解方程的过程中,特别需要注意到积分变量的统一和初始条件的确定.解 (1)运动员入水前可视为自由落体运动,故入水时的速度为运动员入水后,由牛顿定律得P-Ff-F=ma由题意P=F、Ff=bv2,而a=dv/dt=v(dv/dy),代入上式后得-bv2=mv(dv/dy)考虑到初始条件y0=0时,,对上式积分,有(2)将已知条件b/m=0.4m-1,v=0.1v0代入上式,则得2-18 分析 该题可由牛顿第二定律求解.在取自然坐标的情况下,沿圆弧方向的加速度就是切向加速度at,与其相对应的外力Ft是重力的切向分量mgsinα,而与法向加速度an相对应的外力是支持力FN和重力的法向分量mgcosα.由此,可分别列出切向和法向的动力学方程Ft=mdv/dt和Fn=man.由于小球在滑动过程中加速度不是恒定的,因此,需应用积分求解,为使运算简便,可转换积分变量.倡该题也能应用以小球、圆弧与地球为系统的机械能守恒定律求解小球的速度和角速度,方法比较简便.但它不能直接给出小球与圆弧表面之间的作用力.解 小球在运动过程中受到重力P和圆轨道对它的支持力FN.取图(b)所示的自然坐标系,由牛顿定律得(1)(2)由,得,代入(1),并根据小球从点A运动到点C的始末条件,进行积分,有\n得则小球在点C的角速度为由式(2)得由此可得小球对圆轨道的作用力为负号表示2-19 分析 运动学与动力学之间的联系是以加速度为桥梁的,因而,可先分析动力学问题.物体在作圆周运动的过程中,促使其运动状态发生变化的是圆环内侧对物体的支持力FN和环与物体之间的摩擦力Ff,而摩擦力大小与正压力FN′成正比,且FN与FN′又是作用力与反作用力,这样,就可通过它们把切向和法向两个加速度联系起来了,从而可用运动学的积分关系式求解速率和路程. 解 (1)设物体质量为m,取图中所示的自然坐标,按牛顿定律,有由分析中可知,摩擦力的大小Ff=μFN,由上述各式可得取初始条件t=0时v=v0,并对上式进行积分,有(2)当物体的速率从v0减少到1/2v0时,由上式可得所需的时间为物体在这段时间内所经过的路程2-20 分析 物体在发射过程中,同时受到重力和空气阻力的作用,其合力是速率v的一次函数,动力学方程是速率的一阶微分方程,求解时,只需采用分离变量的数学方法即可.但是,在求解高度时,则必须将时间变量通过速度定义式转换为位置变量后求解,并注意到物体上升至最大高度时,速率应为零.解 (1)物体在空中受重力mg和空气阻力Fr=kv作用而减速.由牛顿定律得(1)根据始末条件对上式积分,有(2)利用的关系代入式(1),可得分离变量后积分\n故讨论如不考虑空气阻力,则物体向上作匀减速运动.公式分别算得t≈6.12s和y≈1842-21 分析 由于空气对物体的阻力始终与物体运动的方向相反,因此,物体在上抛过程中所受重力P和阻力Fr的方向相同;而下落过程中,所受重力P和阻力Fr的方向则相反.又因阻力是变力,在解动力学方程时,需用积分的方法.解 分别对物体上抛、下落时作受力分析,以地面为原点,竖直向上为y轴(如图所示).(1)物体在上抛过程中,根据牛顿定律有依据初始条件对上式积分,有物体到达最高处时,v=0,故有(2)物体下落过程中,有对上式积分,有则2-22 分析 该题依然是运用动力学方程求解变力作用下的速度和位置的问题,求解方法与前两题相似,只是在解题过程中必须设法求出阻力系数k.由于阻力Fr=kv2,且Fr又与恒力F的方向相反;故当阻力随速度增加至与恒力大小相等时,加速度为零,此时速度达到最大.因此,根据速度最大值可求出阻力系数来.但在求摩托车所走路程时,需对变量作变换.解 设摩托车沿x轴正方向运动,在牵引力F和阻力Fr同时作用下,由牛顿定律有(1)当加速度a=dv/dt=0时,摩托车的速率最大,因此可得k=F/vm2(2)由式(1)和式(2)可得据始末条件对式(3)积分,有\n则又因式(3)中,再利用始末条件对式(3)积分,有则2-24 分析 如同习题2-5分析中指出的那样,可对木箱加上惯性力F0后,以车厢为参考系进行求解,如图所示,此时木箱在水平方向受到惯性力和摩擦力作用,图中a′为木箱相对车厢的加速度.解 由牛顿第二定律和相关运动学规律有F0-Ff=ma-μmg=ma′(1)v′2=2a′L(2)联立解(1)(2)两式并代入题给数据,得木箱撞上车厢挡板时的速度为第三章 动量守恒定律和能量守恒定律3-1 分析与解 在质点组中内力总是成对出现的,它们是作用力与反作用力.由于一对内力的冲量恒为零,故内力不会改变质点组的总动量.但由于相互有作用力的两个质点的位移大小以及位移与力的夹角一般不同,故一对内力所作功之和不一定为零,应作具体分析,如一对弹性内力的功的代数和一般为零,一对摩擦内力的功代数和一般不为零,对于保守内力来说,所作功能使质点组动能与势能相互转换,因此保守内力即使有可能改变质点组的动能,但也不可能改变质点组的机械能.综上所述(1)(3)说法是正确的.故选(C).3-2 分析与解 对题述系统来说,由题意知并无外力和非保守内力作功,故系统机械能守恒.物体在下滑过程中,一方面通过重力作功将势能转化为动能,另一方面通过物体与斜面之间的弹性内力作功将一部分能量转化为斜面的动能,其大小取决其中一个内力所作功.由于斜面倾角不同,故物体沿不同倾角斜面滑至底端时动能大小不等.动量自然也就不等(动量方向也不同).故(A)(B)(C)三种说法均不正确.至于说法(D)正确,是因为该系统动量虽不守恒(下滑前系统动量为零,下滑后物体与斜面动量的矢量和不可能为零.由此可知,此时向上的地面支持力并不等于物体与斜面向下的重力),但在水平方向上并无外力,故系统在水平方向上分动量守恒.3-3分析与解 保守力作正功时,系统内相应势能应该减少.由于保守力作功与路径无关,而只与始末位置有关,如质点环绕一周过程中,保守力在一段过程中作正功,在另一段过程中必然作负功,两者之和必为零.至于一对作用力与反作用力分别作用于两个质点所作功之和未必为零(详见习题3-2分析),由此可见只有说法(2)正确,故选(C).3-4 分析与解 由题意知,作用在题述系统上的合外力为零,故系统动量守恒,但机械能未必守恒,这取决于在A、B弹开过程中C与A或D与B之间有无相对滑动,如有则必然会因摩擦内力作功,而使一部分机械能转化为热能,故选(D).3-5分析与解\n子弹-木块系统在子弹射入过程中,作用于系统的合外力为零,故系统动量守恒,但机械能并不守恒.这是因为子弹与木块作用的一对内力所作功的代数和不为零(这是因为子弹对地位移大于木块对地位移所致),子弹动能的减少等于子弹克服阻力所作功,子弹减少的动能中,一部分通过其反作用力对木块作正功而转移为木块的动能,另一部分则转化为热能(大小就等于这一对内力所作功的代数和).综上,只有说法(C)的表述是完全正确的.3-6 分析 由于鸟与飞机之间的作用是一短暂时间内急剧变化的变力,直接应用牛顿定律解决受力问题是不可能的.如果考虑力的时间累积效果,运用动量定理来分析,就可避免作用过程中的细节情况.在求鸟对飞机的冲力(常指在短暂时间内的平均力)时,由于飞机的状态(指动量)变化不知道,使计算也难以进行;这时,可将问题转化为讨论鸟的状态变化来分析其受力情况,并根据鸟与飞机作用的相互性(作用与反作用),问题就很简单了.解 以飞鸟为研究对象,取飞机运动方向为x轴正向.由动量定理得式中F′为飞机对鸟的平均冲力,而身长为20cm的飞鸟与飞机碰撞时间约为Δt=l/v,以此代入上式可得鸟对飞机的平均冲力为式中负号表示飞机受到的冲力与其飞行方向相反.从计算结果可知,2.25×105N的冲力大致相当于一个22t的物体所受的重力,可见,此冲力是相当大的.若飞鸟与发动机叶片相碰,足以使发动机损坏,造成飞行事故.3-7 分析 重力是恒力,因此,求其在一段时间内的冲量时,只需求出时间间隔即可.由抛体运动规律可知,物体到达最高点的时间,物体从出发到落回至同一水平面所需的时间是到达最高点时间的两倍.这样,按冲量的定义即可求得结果.另一种解的方法是根据过程的始、末动量,由动量定理求出.解1 物体从出发到达最高点所需的时间为则物体落回地面的时间为于是,在相应的过程中重力的冲量分别为解2 根据动量定理,物体由发射点O运动到点A、B的过程中,重力的冲量分别为分析 本题可由冲量的定义式,求变力的冲量,继而根据动量定理求物体的速度v2.解 (1)由分析知\n(2)由I=300=30t+2t2,解此方程可得t=6.86s(另一解不合题意已舍去)(3)由动量定理,有I=mv2-mv1由(2)可知t=6.86s时I=300N·s,将I、m及v1代入可得3-9 分析 从人受力的情况来看,可分两个阶段:在开始下落的过程中,只受重力作用,人体可看成是作自由落体运动;在安全带保护的缓冲过程中,则人体同时受重力和安全带冲力的作用,其合力是一变力,且作用时间很短.为求安全带的冲力,可以从缓冲时间内,人体运动状态(动量)的改变来分析,即运用动量定理来讨论.事实上,动量定理也可应用于整个过程.但是,这时必须分清重力和安全带冲力作用的时间是不同的;而在过程的初态和末态,人体的速度均为零.这样,运用动量定理仍可得到相同的结果.解1 以人为研究对象,按分析中的两个阶段进行讨论.在自由落体运动过程中,人跌落至2m处时的速度为(1)在缓冲过程中,人受重力和安全带冲力的作用,根据动量定理,有(2)由式(1)、(2)可得安全带对人的平均冲力大小为解2 整个过程.由动量定理有3-10 分析 由冲量定义求得力F的冲量后,根据动量原理,即为动量增量,注意用式积分前,应先将式中x用x=Acosωt代之,方能积分.解 力F的冲量为即3-11分析 对于弯曲部分AB段内的水而言,由于流速一定,在时间Δt内,从其一端流入的水量等于从另一端流出的水量.因此,对这部分水来说,在时间Δt内动量的增量也就是流入与流出水的动量的增量Δp=Δm(vB-vA);此动量的变化是管壁在Δt时间内对其作用冲量I的结果.依据动量定理可求得该段水受到管壁的冲力F;由牛顿第三定律,自然就得到水流对管壁的作用力F′=-F.解 在Δt时间内,从管一端流入(或流出)水的质量为Δm=ρυSΔt,弯曲部分AB的水的动量的增量则为Δp=Δm(vB-vA)=ρυSΔt(vB-vA)依据动量定理I=Δp,得到管壁对这部分水的平均冲力从而可得水流对管壁作用力的大作用力的方向则沿直角平分线指向弯管外侧.3-12 分析\n 根据抛体运动规律,物体在最高点处的位置坐标和速度是易求的.因此,若能求出第二块碎片抛出的速度,按抛体运动的规律就可求得落地的位置.为此,分析物体在最高点处爆炸的过程,由于爆炸力属内力,且远大于重力,因此,重力的冲量可忽略,物体爆炸过程中应满足动量守恒.由于炸裂后第一块碎片抛出的速度可由落体运动求出,由动量守恒定律可得炸裂后第二块碎片抛出的速度,进一步求出落地位置.解 取如图示坐标,根据抛体运动的规律,爆炸前,物体在最高点A的速度的水平分量为(1)物体爆炸后,第一块碎片竖直落下的运动当该碎片落地时,有y1=0,t=t1,则由上式得爆炸后第一块碎片抛出的速度(2)又根据动量守恒定律,在最高点处有(3)(4)联立解式(1)、(2)、(3)和(4),可得爆炸后第二块碎片抛出时的速度分量分别为爆炸后,第二块碎片作斜抛运动,其运动方程为(5)(6)落地时,y2=0,由式(5)、(6)可解得第二块碎片落地点的水平位置x2=500m3-13 分析 由于两船横向传递的速度可略去不计,则对搬出重物后的船A与从船B搬入的重物所组成的系统Ⅰ来讲,在水平方向上无外力作用,因此,它们相互作用的过程中应满足动量守恒;同样,对搬出重物后的船B与从船A搬入的重物所组成的系统Ⅱ亦是这样.由此,分别列出系统Ⅰ、Ⅱ的动量守恒方程即可解出结果.解 设A、B两船原有的速度分别以vA、vB表示,传递重物后船的速度分别以vA′、vB′表示,被搬运重物的质量以m表示.分别对上述系统Ⅰ、Ⅱ应用动量守恒定律,则有(1)(2)由题意知vA′=0,vB′=3.4m·s-1代入数据后,可解得3-14 分析\n 人跳跃距离的增加是由于他在最高点处向后抛出物体所致.在抛物的过程中,人与物之间相互作用力的冲量,使他们各自的动量发生了变化.如果把人与物视为一系统,因水平方向不受外力作用,故外力的冲量为零,系统在该方向上动量守恒.但在应用动量守恒定律时,必须注意系统是相对地面(惯性系)而言的,因此,在处理人与物的速度时,要根据相对运动的关系来确定.至于,人因跳跃而增加的距离,可根据人在水平方向速率的增量Δv来计算.解 取如图所示坐标.把人与物视为一系统,当人跳跃到最高点处,在向左抛物的过程中,满足动量守恒,故有式中v为人抛物后相对地面的水平速率,v-u为抛出物对地面的水平速率.得人的水平速率的增量为而人从最高点到地面的运动时间为所以,人跳跃后增加的距离3-17 分析 由题意知质点是在变力作用下运动,因此要先找到力F与位置x的关系,由题给条件知.则该力作的功可用式计算,然后由动能定理求质点速率.解 由分析知,则在x=0到x=L过程中作功,由动能定理有得x=L处的质点速率为此处也可用牛顿定律求质点速率,即分离变量后,两边积分也可得同样结果.3-18 分析 该题中虽施以“恒力”,但是,作用在物体上的力的方向在不断变化.需按功的矢量定义式来求解.解 取图示坐标,绳索拉力对物体所作的功为3-19 分析 本题是一维变力作功问题,仍需按功的定义式来求解.关键在于寻找力函数F=F(x).根据运动学关系,可将已知力与速度的函数关系F(v)=kv2变换到F(t),进一步按x=ct3的关系把F(t)转换为F(x),这样,就可按功的定义式求解.\n解 由运动学方程x=ct3,可得物体的速度按题意及上述关系,物体所受阻力的大小为则阻力的功为3-20 分析 由于水桶在匀速上提过程中,拉力必须始终与水桶重力相平衡.水桶重力因漏水而随提升高度而变,因此,拉力作功实为变力作功.由于拉力作功也就是克服重力的功,因此,只要能写出重力随高度变化的关系,拉力作功即可题3-20图求出.解:水桶在匀速上提过程中,a=0,拉力与水桶重力平衡,有F+P=0,水桶重力随位置的变化关系为P=mg–αgy其中α=0.2kg/m,人对水桶的拉力的功为3-21分析 (1)在计算功时,首先应明确是什么力作功.小球摆动过程中同时受到重力和张力作用.重力是保守力,根据小球下落的距离,它的功很易求得;至于张力虽是一变力,但是,它的方向始终与小球运动方向垂直,根据功的矢量式,即能得出结果来.(2)在计算功的基础上,由动能定理直接能求出动能和速率.(3)在求最低点的张力时,可根据小球作圆周运动时的向心加速度由重力和张力提供来确定.解(1),重力对小球所作的功只与始末位置有关在小球摆动过程中,张力F的方向总是与运动方向垂直,所以,张力的功(2)根据动能定理,小球摆动过程中,其动能的增量是由于重力对它作功的结果.初始时动能为零,因而,在最低位置时的动能为小球在最低位置的速率为3)当小球在最低位置时,由牛顿定律得3-22分析质点在运动过程中速度的减缓,意味着其动能减少;而减少的这部分动能则消耗在运动中克服摩擦力作功上.由此,可依据动能定理列式解之.(1)摩擦力作功为(1)(2)由于摩擦力是一恒力,且Ff=μmg,故有(2)由式(1)、(2)可得动摩擦因数为\n(3)由于一周中损失的动能为,则在静止前可运行的圈数圈3-23 分析 运用守恒定律求解是解决力学问题最简捷的途径之一.因为它与过程的细节无关,也常常与特定力的细节无关.“守恒”则意味着在条件满足的前提下,过程中任何时刻守恒量不变.在具体应用时,必须恰当地选取研究对象(系统),注意守恒定律成立的条件.该题可用机械能守恒定律来解决.选取两块板、弹簧和地球为系统,该系统在外界所施压力撤除后(取状态1),直到B板刚被提起(取状态2),在这一过程中,系统不受外力作用,而内力中又只有保守力(重力和弹力)作功,支持力不作功,因此,满足机械能守恒的条件.只需取状态1和状态2,运用机械能守恒定律列出方程,并结合这两状态下受力的平衡,便可将所需压力求出.解 选取坐标,取原点O处为重力势能和弹性势能零点.作各状态下物体的受力图.对A板而言,当施以外力F时,根据受力平衡有F1=P1+F(1)当外力撤除后,按分析中所选的系统,由机械能守恒定律可得式中y1、y2为M、N两点对原点O的位移.因为F1=ky1,F2=ky2及P1=m1g,上式可写为F1-F2=2P1(2)由式(1)、(2)可得F=P1+F2(3)当A板跳到N点时,B板刚被提起,此时弹性力F′2=P2,且F2=F′2.由式(3)可得F=P1+P2=(m1+m2)g3-24 分析 矿车在下滑和返回的全过程中受到重力、弹力、阻力和支持力作用.若取矿车、地球和弹簧为系统,支持力不作功,重力、弹力为保守力,而阻力为非保守力.矿车在下滑和上行两过程中,存在非保守力作功,系统不满足机械能守恒的条件,因此,可应用功能原理去求解.在确定重力势能、弹性势能时,应注意势能零点的选取,常常选取弹簧原长时的位置为重力势能、弹性势能共同的零点,这样做对解题比较方便.解 取沿斜面向上为x轴正方向.弹簧被压缩到最大形变时弹簧上端为坐标原点O.矿车在下滑和上行的全过程中,按题意,摩擦力所作的功为Wf=(0.25mg+0.25m′g)(l+x)(1)式中m′和m分别为矿车满载和空载时的质量,x为弹簧最大被压缩量.根据功能原理,在矿车运动的全过程中,摩擦力所作的功应等于系统机械能增量的负值,故有Wf=-ΔE=-(ΔEP+ΔEk)由于矿车返回原位时速度为零,故ΔEk=0;而ΔEP=(m-m′)g(l+x)sinα,故有Wf=-(m-m′)g(l+x)sinα(2)由式(1)、(2)可解得m:m’=1:33-25 分析 由于两次锤击的条件相同,锤击后钉子获得的速度也相同,所具有的初动能也相同.钉子钉入木板是将钉子的动能用于克服阻力作功,由功能原理可知钉子两次所作的功相等.由于阻力与进入木板的深度成正比,按变力的功的定义得两次功的表达式,并由功相等的关系即可求解.解 因阻力与深度成正比,则有F=kx(k为阻力系数).现令x0=1.00×10-2m,第二次钉入的深度为Δx,由于钉子两次所作功相等,可得Δx=0.41×10-2m\n3-26 分析 根据势能和动能的定义,只需知道卫星的所在位置和绕地球运动的速率,其势能和动能即可算出.由于卫星在地球引力作用下作圆周运动,由此可算得卫星绕地球运动的速率和动能.由于卫星的引力势能是属于系统(卫星和地球)的,要确定特定位置的势能时,必须规定势能的零点,通常取卫星与地球相距无限远时的势能为零.这样,卫星在特定位置的势能也就能确定了.至于卫星的机械能则是动能和势能的总和.解 (1)卫星与地球之间的万有引力提供卫星作圆周运动的向心力,由牛顿定律可得则(2)取卫星与地球相距无限远(r→∞)时的势能为零,则处在轨道上的卫星所具有的势能为(3)卫星的机械能3-27 分析 取冰块、屋面和地球为系统,由于屋面对冰块的支持力FN始终与冰块运动的方向垂直,故支持力不作功;而重力P又是保守内力,所以,系统的机械能守恒.但是,仅有一个机械能守恒方程不能解出速度和位置两个物理量;因此,还需设法根据冰块在脱离屋面时支持力为零这一条件,由牛顿定律列出冰块沿径向的动力学方程.求解上述两方程即可得出结果.解 由系统的机械能守恒,有(1)根据牛顿定律,冰块沿径向的动力学方程为(2)冰块脱离球面时,支持力FN=0,由式(1)、(2)可得冰块的角位置冰块此时的速率为v的方向与重力P方向的夹角为α=90°-θ=41.8°3-28 分析 若取小球、弹簧和地球为系统,小球在被释放后的运动过程中,只有重力和弹力这两个保守内力作功,轨道对球的支持力不作功,因此,在运动的过程中,系统的机械能守恒.运用守恒定律解题时,关键在于选好系统的初态和终态.为获取本题所求的结果,初态选在压缩弹簧刚被释放时刻,这样,可使弹簧的劲度系数与初态相联系;而终态则取在小球刚好能通过半圆弧时的最高点C处,因为这时小球的速率正处于一种临界状态,若大于、等于此速率时,小球定能沿轨道继续向前运动;小于此速率时,小球将脱离轨道抛出.该速率则可根据重力提供圆弧运动中所需的向心力,由牛顿定律求出.这样,再由系统的机械能守恒定律即可解出该弹簧劲度系数的最小值.解 小球要刚好通过最高点C时,轨道对小球支持力FN=0,因此,有\n(1)取小球开始时所在位置A为重力势能的零点,由系统的机械能守恒定律,有(2)由式(1)、(2)3-29 分析 这也是一种碰撞问题.碰撞的全过程是指小球刚与弹簧接触直至弹簧被压缩到最大,小球与靶刚好到达共同速度为止,在这过程中,小球和靶组成的系统在水平方向不受外力作用,外力的冲量为零,因此,在此方向动量守恒.但是,仅靠动量守恒定律还不能求出结果来.又考虑到无外力对系统作功,系统无非保守内力作功,故系统的机械能也守恒.应用上述两个守恒定律,并考虑到球与靶具有相同速度时,弹簧被压缩量最大这一条件,即可求解.应用守恒定律求解,可免除碰撞中的许多细节问题.解 设弹簧的最大压缩量为x0.小球与靶共同运动的速度为v1.由动量守恒定律,有(1)又由机械能守恒定律,有(2)由式(1)、(2)可得3-30 分析 该题可分两个过程分析.首先是弹丸穿越摆锤的过程.就弹丸与摆锤所组成的系统而言,由于穿越过程的时间很短,重力和的张力在水平方向的冲量远小于冲击力的冲量,因此,可认为系统在水平方向不受外力的冲量作用,系统在该方向上满足动量守恒.摆锤在碰撞中获得了一定的速度,因而具有一定的动能,为使摆锤能在垂直平面内作圆周运动,必须使摆锤在最高点处有确定的速率,该速率可由其本身的重力提供圆周运动所需的向心力来确定;与此同时,摆锤在作圆周运动过程中,摆锤与地球组成的系统满足机械能守恒定律,根据两守恒定律即可解出结果.解 由水平方向的动量守恒定律,有(1)为使摆锤恰好能在垂直平面内作圆周运动,在最高点时,摆线中的张力FT=0,则(2)式中v′h为摆锤在圆周最高点的运动速率.又摆锤在垂直平面内作圆周运动的过程中,满足机械能守恒定律,故有(3)解得弹丸所需速率的最小值为3-31分析 对于粒子的对心弹性碰撞问题,同样可利用系统(电子和氢原子)在碰撞过程中所遵循的动量守恒和机械能守恒来解决.本题所求电子传递给氢原子的能量的百分数,即氢原子动能与电子动能之比.根据动能的定义,有,而氢原子与电子的质量比m′/m\n是已知的,它们的速率比可应用上述两守恒定律求得,即可求出.解 以EH表示氢原子被碰撞后的动能,Ee表示电子的初动能,则(1)由于粒子作对心弹性碰撞,在碰撞过程中系统同时满足动量守恒和机械能守恒定律,故有(2)(3)由题意知m′/m=1840,解上述三式可得3-32 分析 这是粒子系统的二维弹性碰撞问题.这类问题通常采用守恒定律来解决.因为粒子系统在碰撞的平面内不受外力作用,同时,碰撞又是完全弹性的,故系统同时满足动量守恒和机械能守恒.由两守恒定律方程即可解得结果.解 取如图所示的坐标,由于粒子系统属于斜碰,在碰撞平面内根据系统动量守恒定律可取两个分量式,有(1)(2)又由机械能守恒定律,有(3)解式(1)、(2)、(3)可得碰撞后B粒子的速率为各粒子相对原粒子方向的偏角分别为3-33 分析 该题可分两个阶段来讨论,首先是子弹和物块的撞击过程,然后是物块(包含子弹)沿斜面向上的滑动过程.在撞击过程中,对物块和子弹组成的系统而言,由于撞击前后的总动量明显是不同的,因此,撞击过程中动量不守恒.应该注意,不是任何碰撞过程中动量都是守恒的.但是,若取沿斜面的方向,因撞击力(属于内力)远大于子弹的重力P1和物块的重力P2在斜面的方向上的分力以及物块所受的摩擦力Ff,在该方向上动量守恒,由此可得到物块被撞击后的速度.在物块沿斜面上滑的过程中,为解题方便,可重新选择系统(即取子弹、物块和地球为系统),此系统不受外力作用,而非保守内力中仅摩擦力作功,根据系统的功能原理,可解得最终的结果.\n解 在子弹与物块的撞击过程中,在沿斜面的方向上,根据动量守恒有(1)在物块上滑的过程中,若令物块刚滑出斜面顶端时的速度为v2,并取A点的重力势能为零.由系统的功能原理可得:3-34 分析 由于桌面无摩擦,容器可以在水平桌面上滑动,当小球沿容器内壁下滑时,容器在桌面上也要发生移动.将小球与容器视为系统,该系统在运动过程中沿水平桌面方向不受外力作用,系统在该方向上的动量守恒;若将小球、容器与地球视为系统,因系统无外力作用,而内力中重力是保守力,而支持力不作功,系统的机械能守恒.由两个守恒定律可解得小球和容器在惯性系中的速度.由于相对运动的存在,小球相对容器运动的轨迹是圆,而相对桌面运动的轨迹就不再是圆了,因此,在运用曲线运动中的法向动力学方程求解小球受力时,必须注意参考系的选择.若取容器为参考系(非惯性系),小球在此参考系中的轨迹仍是容器圆弧,其法向加速度可由此刻的速度(相对于容器速度)求得.在分析小球受力时,除重力和支持力外,还必须计及它所受的惯性力.小球位于容器的底部这一特殊位置时,容器的加速度为零,惯性力也为零.这样,由法向动力学方程求解小球所受的支持力就很容易了.若仍取地面为参考系(惯性系),虽然无需考虑惯性力,但是因小球的轨迹方程比较复杂,其曲率半径及法向加速度难以确定,使求解较为困难.解 根据水平方向动量守恒定律以及小球在下滑过程中机械能守恒定律可分别得(1)(2)式中vm、vm′分别表示小球、容器相对桌面的速度.由式(1)、(2)可得小球到达容器底部时小球、容器的速度大小分别为由于小球相对地面运动的轨迹比较复杂,为此,可改为以容器为参考系(非惯性系).在容器底部时,小球相对容器的运动速度为(3)在容器底部,小球所受惯性力为零,其法向运动方程(4)由式(3)、(4)可得小球此时所受到的支持力为\n3-35 分析 (1)桩依靠自重下沉是利用重力势能的减少来克服摩擦力作功,可根据功能原理求解.(2)打桩过程可分为三个阶段.1.锤自由下落的过程.在此过程中,锤与地球系统的势能转化为锤的动能,满足机械能守恒定律.2.碰撞的过程.在这过程中,由于撞击力远大于重力和泥土的阻力,锤与桩这一系统满足动量守恒定律.由于碰撞是完全非弹性的,碰撞后桩和锤以共同速度运动.3.桩下沉的过程.在这过程中,桩和锤的动能和系统的势能将用于克服摩擦力作功,可应用系统的功能原理.根据以上分析列出相应方程式即可解.(3)仍为打桩过程.所不同的是,在此过程中,碰撞是非弹性的,因此,桩获得的速度还需根据锤反弹的高度求出.桩下沉时,仍是以桩的动能和势能减少来克服摩擦力作功的.解 (1)在锤击桩之前,由于桩的自重而下沉,这时,取桩和地球为系统,根据系统的功能原理,有(1)桩下沉的距离为(2)锤从1m高处落下,其末速率为.由于锤与桩碰撞是完全非弹性的,锤与桩碰撞后将有共同的速率,按动量守恒定律,有(2)随后桩下沉的过程中,根据系统的功能原理,有(3)由式(2)、(3)可解得桩下沉的距离为h2=0.2m(3)当桩已下沉35m时,再一次锤桩,由于此时的碰撞是一般非弹性的,锤碰撞后的速率可由上抛运动规律得,再根据动量守恒定律,有(4)随后,桩在下沉过程中,再一次应用系统的功能原理,得(5)由式(4)、(5)可得桩再一次下沉的距离h=0.003第四章刚体的转动1应选(B).2.(B)3.(C)4分析与解 对于圆盘一子弹系统来说,并无外力矩作用,故系统对轴O的角动量守恒,故L不变,此时应有下式成立,即式中mvD为子弹对点O的角动量ω0为圆盘初始角速度,J为子弹留在盘中后系统对轴O的转动惯量,J0为子弹射入前盘对轴O的转动惯量.由于J>J0,则ω<ω0.故选(C).5.B6解 (1)由于角速度ω=2πn(n为单位时间内的转数),根据角加速度的定义,在变速转动中角加速度为(2)发动机曲轴转过的角度为\n在12s内曲轴转过的圈数为圈7解 (1)根据题意中转速随时间的变化关系,将t=6.0s代入,即得(2)角速度随时间变化的规律为(3)t=6.0s时转过的角度为则t=6.0s时电动机转过的圈数圈8解 由图可得此二式相加,可得则由二式相比,可得则9解 根据转动惯量的叠加性,由匀质圆盘、圆柱体对轴的转动惯量公式可得10解 (1)解1 由分析知解2 整个圆盘对OO轴转动惯量为,挖去的小圆盘对OO轴转动惯量,由分析知,\n剩余部分对OO轴的转动惯量为(2)由平行轴定理,剩余部分对O′O′轴的转动惯量为11.解1 设绳子的拉力为FT,对飞轮而言,根据转动定律,有(1)而对重物而言,由牛顿定律,有(2)由于绳子不可伸长,因此,有(3)重物作匀加速下落,则有(4)由上述各式可解得飞轮的转动惯量为解2 根据系统的机械能守恒定律,有(1′)而线速度和角速度的关系为(2′)又根据重物作匀加速运动时,有(3′)(4′)由上述各式可得若轴承处存在摩擦,上述测量转动惯量的方法仍可采用.这时,只需通过用两个不同质量的重物做两次测量即可消除摩擦力矩带来的影响.解1 在匀变速转动中,角加速度,由转动定律,可得飞轮所经历的时间解2 飞轮在恒外力矩作用下,根据角动量定理,有则412解 (1)分别作两物体的受力分析,如图(b).对实心圆柱体而言,由转动定律得对悬挂物体而言,依据牛顿定律,有且FT=FT′.又由角量与线量之间的关系,得\n解上述方程组,可得物体下落的加速度在t=1.0s时,B下落的距离为(2)由式(2)可得绳中的张力为13解 分别对两物体及组合轮作受力分析,如图(b).根据质点的牛顿定律和刚体的转动定律,有(1)(2)(3),(4)由角加速度和线加速度之间的关系,有(5)(6)解上述方程组,可得14解 作A、B和滑轮的受力分析,如图(b).其中A是在张力FT1、重力P1,支持力FN和摩擦力Ff的作用下运动,根据牛顿定律,沿斜面方向有(1)而B则是在张力FT2和重力P2的作用下运动,有(2)由于绳子不能伸长、绳与轮之间无滑动,则有(3)对滑轮而言,根据定轴转动定律有(4),(5)解上述各方程可得\n15解 飞轮和闸杆的受力分析,如图(b)所示.根据闸杆的力矩平衡,有而,则闸瓦作用于轮的摩擦力矩为(1)摩擦力矩是恒力矩,飞轮作匀角加速转动,由转动的运动规律,有(2)因飞轮的质量集中于轮缘,它绕轴的转动惯量,根据转动定律,由式(1)、(2)可得制动力16解 (1)由分析可知,圆盘上半径为r、宽度为dr的同心圆环所受的摩擦力矩为式中k为轴向的单位矢量.圆盘所受的总摩擦力矩大小为(2)由于摩擦力矩是一恒力矩,圆盘的转动惯量J=mR2/2.由角动量定理MΔt=Δ(Jω),可得圆盘停止的时间为17解 (1)通风机叶片所受的阻力矩为M=-Cω,由转动定律M=Jα,可得叶片的角加速度为(1)根据初始条件对式(1)积分,有由于C和J均为常量,得(2)当角速度由ω0→12ω0时,转动所需的时间为(2)根据初始条件对式(2)积分,有即在时间t内所转过的圈数\n18解 (1)两小球对z轴的转动惯量为,则系统对z轴的角动量为此处也可先求出每个小球对z轴的角动量后再求和.(2)由角动量定理得t=0时,合外力矩为此处也可先求解系统绕z轴的角加速度表达式,即,再由M=Jα求得M.19解 (1)碎块抛出时的初速度为由于碎块竖直上抛运动,它所能到达的高度为(2)圆盘在裂开的过程中,其角动量守恒,故有式中为圆盘未碎时的角动量;为碎块被视为质点时,碎块对轴的角动量;L为破裂后盘的角动量.则20解 根据角动量守恒定理式中为子弹绕轴的转动惯量,J2ω为子弹在陷入杆前的角动量,ω=2v/l为子弹在此刻绕轴的角速度.为杆绕轴的转动惯量.可得杆的角速度为21解 设相互作用力为F,在啮合的短时间Δt内,根据角动量定理,对轮Ⅰ、轮Ⅱ分别有(1)(2)两轮啮合后应有相同的线速度,故有(3)由上述各式可解得啮合后两轮的角速度分别为22解 由相对角速度的关系,人相对地面的角速度为由于系统初始是静止的,根据系统的角动量守恒定律,有\n式中J0、J1=mR2分别为转台、人对转台中心轴的转动惯量.由式(1)、(2)可得转台的角速度为负号表示转台转动的方向与人对地面的相反.23解 在时间0→10s内落至台面的砂粒的质量为根据系统的角动量守恒定律,有则t=10s时,转台的角速度24解 取飞船和喷出的气体为系统,根据角动量守恒定律,有(1)因喷气的流量恒定,故有(2)由式(1)、(2)可得喷气的喷射时间为25解 (1)蜘蛛垂直下落至转台边缘时,由系统的角动量守恒定律,有式中为转台对其中心轴的转动惯量,为蜘蛛刚落至台面边缘时,它对轴的转动惯量.于是可得(2)在蜘蛛向中心轴处慢慢爬行的过程中,其转动惯量将随半径r而改变,即.在此过程中,由系统角动量守恒,有26解 (1)由刚体的角动量定理得(2)取棒和地球为一系统,并选O处为重力势能零点.在转动过程中,系统的机械能守恒,即由式(1)、(2)可得棒的偏转角度为\n27解 由于卫星在近地点和远地点处的速度方向与椭圆径矢垂直,因此,由角动量守恒定律有(1)又因卫星与地球系统的机械能守恒,故有(2)式中G为引力常量,mE和m分别为地球和卫星的质量,r1和r2是卫星在近地点和远地点时离地球中心的距离.由式(1)、(2)可解得卫星在近地点和远地点的速率分别为28解 (1)地球的质量mE=5.98×1024kg,半径R=6.37×106m,所以,地球自转的动能(2)对式两边微分,可得当周期变化一定量时,有(1)由于地球自转减慢而引起动能的减少量为(2)又根据动能定理(3)由式(2)、(3)可得潮汐的摩擦力矩为式中n为一年中的天数,ΔT为一天中周期的增加量.29解 (1)根据分析,小球在转动的过程中,角动量保持守恒,故有式中J0和J1分别是小球在半径为r0和12r0时对轴的转动惯量,即式中J0和J1分别是小球在半径为r0和1/2r0时对轴的转动惯量,即和,则(2)随着小球转动角速度的增加,其转动动能也增加,这正是拉力作功的结果.由转动的动能定理可得拉力的功为30解 (1)棒绕端点的转动惯量由转动定律M=Jα可得棒在θ位置时的角加速度为\n当θ=60°时,棒转动的角加速度由于,根据初始条件对式(1)积分,有则角速度为(2)根据机械能守恒,棒下落至竖直位置时的动能为(3)由于该动能也就是转动动能,即,所以,棒落至竖直位置时的角速度为31解 (1)取两飞轮为系统,根据系统的角动量守恒,有则B轮的转动惯量为(2)系统在啮合过程中机械能的变化为式中负号表示啮合过程中机械能减少.32解 取子弹与摆为系统,根据系统的角动量守恒,有(1)式中、和分别为子弹、摆锤和杆对轴的转动惯量.根据摆在转动过程中机械能守恒,有2)由式(1)、(2)可得子弹速度的最小值为33解 以环和小球为转动系统,由系统的角动量守恒有(1)取环、小球与地球为系统时,由系统的机械能守恒可得\n(2)由式(1)、(2)可解得小球在B点时,环的角速度与小球相对于环的线速度分别为 小球在C点时,由于总的转动惯量不变,用同样的方法可得环的角速度和小球相对于环的速度分别为34解 飞船绕其中心轴的转动惯量为,两质点在起始时和轻线割断瞬间的转动惯量分别为和.由于过程中系统的角动量守恒,为使轻线沿径向拉直时,飞船转动正好停止,则有(1)又根据过程中系统的机械能守恒,有(2)由上述两式可解得35解 弹射入滑块瞬间,因属非弹性碰撞,根据动量守恒定律有(1)在弹簧的弹力作用下。块与子弹一起运动的过程中,若将弹簧包括在系统内,则系统满足机械能守恒定律,有(2)又在滑块绕固定点作弧线运动中,系统满足角动量守恒定律,故有(3)式中θ为滑块速度方向与弹簧线之间的夹角.联立解上述三式,可得36解 (1)棒的质心的动量定理为式中F是棒所受的平均力,vC为棒质心的速度.棒在转动过程中受到外力矩作用,根据角动量定理,有式中J为棒绕质心的转动惯量(即).而根据角量与线量的关系可解得\n(2)在此过程中转动动能的改变为37解 设木轴所受静摩擦力Ff如图所示,则有(1)(2)(3)由(1)、(2)、(3)式可得h3=0.033m查看更多