- 2021-05-26 发布 |
- 37.5 KB |
- 11页


申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
【物理】2020届一轮复习人教版第五章实验五验证机械能守恒定律学案(江苏专用)
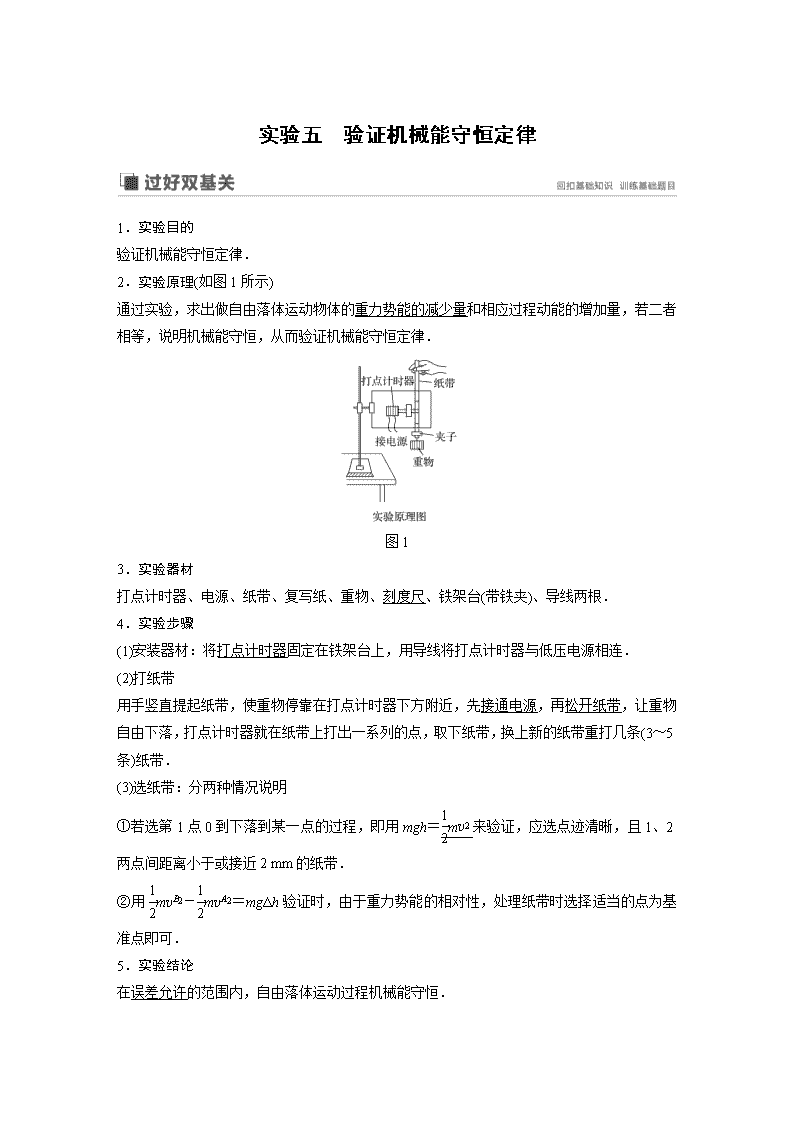
实验五 验证机械能守恒定律 1.实验目的 验证机械能守恒定律. 2.实验原理(如图1所示) 通过实验,求出做自由落体运动物体的重力势能的减少量和相应过程动能的增加量,若二者相等,说明机械能守恒,从而验证机械能守恒定律. 图1 3.实验器材 打点计时器、电源、纸带、复写纸、重物、刻度尺、铁架台(带铁夹)、导线两根. 4.实验步骤 (1)安装器材:将打点计时器固定在铁架台上,用导线将打点计时器与低压电源相连. (2)打纸带 用手竖直提起纸带,使重物停靠在打点计时器下方附近,先接通电源,再松开纸带,让重物自由下落,打点计时器就在纸带上打出一系列的点,取下纸带,换上新的纸带重打几条(3~5条)纸带. (3)选纸带:分两种情况说明 ①若选第1点0到下落到某一点的过程,即用mgh=mv2来验证,应选点迹清晰,且1、2两点间距离小于或接近2 mm的纸带. ②用mv-mv=mgΔh验证时,由于重力势能的相对性,处理纸带时选择适当的点为基准点即可. 5.实验结论 在误差允许的范围内,自由落体运动过程机械能守恒. 6.误差分析 (1)测量误差:减小测量误差的方法,一是测下落距离时都从0点量起,一次将各点对应下落高度测量完,二是多测几次取平均值. (2)系统误差:由于重物和纸带下落过程中要克服阻力做功,故动能的增加量ΔEk=mv必定稍小于重力势能的减少量ΔEp=mghn,改进办法是调整安装的器材,尽可能地减小阻力. 7.注意事项 (1)打点计时器要竖直:安装打点计时器时要竖直架稳,使其两限位孔在同一竖直平面内,以减少摩擦阻力. (2)重物应选用质量大、体积小、密度大的材料. (3)应先接通电源,让打点计时器正常工作,后松开纸带让重物下落. (4)测长度,算速度:计算某时刻的瞬时速度用vn=,不能用vn=或vn=gt来计算. 8.验证方案 方案一:利用起始点和第n点计算 代入mghn和mv,如果在实验误差允许的范围内,mghn和mv相等,则验证了机械能守恒定律. 方案二:任取两点计算 (1)任取两点A、B,测出hAB,算出mghAB. (2)算出mv-mv的值. (3)在实验误差允许的范围内,若mghAB=mv-mv,则验证了机械能守恒定律. 方案三:图象法 从纸带上选取多个点,测量从第一点到其余各点的下落高度h,并计算各点速度的平方v2,然后以v2为纵轴,以h为横轴,根据实验数据作出v2-h图象.若在误差允许的范围内图象是一条过原点且斜率为g的直线,则验证了机械能守恒定律. 命题点一 教材原型实验 例1 (2018·扬州中学5月模拟)用落体法验证机械能守恒定律,器材安装如图2. 图2 (1)请指出图中的错误及不妥之处(至少写出两处) ①________________________________________________________________________; ②________________________________________________________________________. (2)改进实验中错误及不妥之处后,打出如图3所示一条纸带.已知打点计时器所接电源频率为50 Hz,根据纸带所给数据,打C点时重物的速度为________ m/s.(结果保留三位有效数字) 图3 (3)某同学选用两个形状相同、质量不同的重物a和b进行实验测得几组数据,画出-h的图象如图4所示,求出图线的斜率k,由图象可知a的质量m1______b的质量m2(选填“大于”或“小于”). 图4 (4)通过分析发现造成k2值偏小的原因是实验过程中存在各种阻力,已知实验所用重物的质量m2=0.052 kg,当地重力加速度g=9.78 m/s2,求出重物所受的平均阻力Ff=________ N. 答案 (1)①使用的是直流电源 ②重物离打点计时器太远 ③没有从上方提着纸带,而是用手托着重物 (2)2.25 (3)大于 (4)0.031 2 变式1 (2018·泰州中学月考)在用打点计时器“验证机械能守恒定律”的实验中,使质量为m=1.00 kg的重物自由下落,打点计时器在纸带上打出一系列的点,选取一条符合实验要求的纸带如图5所示.O为第一个点,A、B、C为从合适位置开始选取连续点中的三个点.已知打点计时器每隔0.02 s打一个点,当地的重力加速度为g=9.80 m/s2,那么: 图5 (1)根据图中的数据,应取图中O点到________点的过程来验证机械能守恒定律; (2)从O点到(1)问中所取的点,重物重力势能的减少量ΔEp=________ J,动能增加量ΔEk=________ J(结果均保留三位有效数字); (3)若测出纸带上所有各点到O点之间的距离,根据纸带算出各点的速度v及物体下落的高度h,则以为纵轴,以h为横轴画出的图象是下图中的________. 答案 (1)B (2)1.88 1.84 (3)A 命题点二 实验方案的创新 例2 (2018·扬州市一模)某同学利用如图6所示的实验装置“验证机械能守恒定律”.将气垫导轨固定在水平桌面上,调节旋钮使其水平.在气垫导轨的左端固定一光滑的定滑轮,在B处固定一光电门,测出滑块及遮光条的总质量为M,将质量为m的钩码通过细线与滑块连接.打开气源,滑块从A处由静止释放,宽度为b的遮光条经过光电门的挡光时间为t,取挡光时间t内的平均速度作为滑块经过B处的速度,A、B之间的距离为d,重力加速度为g. 图6 (1)调整光电门的位置,使得滑块通过B点时钩码没有落地.滑块由A点运动到B点的过程中,系统动能增加量ΔEk为________,系统重力势能减少量ΔEp为________.(以上结果均用题中所给字母表示) (2)若实验结果发现ΔEk总是略大于ΔEp,可能的原因是________. A.存在空气阻力 B.滑块没有到达B点时钩码已经落地 C.测出滑块左端与光电门B之间的距离作为d D.测出滑块右端与光电门B之间的距离作为d 答案 见解析 解析 (1)滑块通过光电门B速度为:vB=;滑块从A处到达B处时m和M组成的系统动能增加量为:ΔEk=(M+m)()2=; 系统的重力势能减少量可表示为:ΔEp=mgd. (2)若存在空气阻力,则有ΔEk总是略小于ΔEp,故A错误;滑块没有到达B点时钩码已经落地,拉力对滑块做的功会减小,ΔEk应小于ΔEp,故B错误;将滑块左端与光电门B之间的距离作为d,钩码下落的高度算少了,ΔEk将大于ΔEp,故C正确;将滑块右端与光电门B之间的距离作为d,钩码下落的高度算多了,ΔEk将小于ΔEp,故D错误. 例3 (2016·江苏单科·11)某同学用如图7所示的装置验证机械能守恒定律.一根细线系住钢球,悬挂在铁架台上,钢球静止于A点,光电门固定在A的正下方,在钢球底部竖直地粘住一片宽度为d的遮光条.将钢球拉至不同位置由静止释放,遮光条经过光电门的挡光时间t可由计时器测出,取v=作为钢球经过A点时的速度.记录钢球每次下落的高度h和计时器示数t,计算并比较钢球在释放点和A点之间的势能变化大小ΔEp与动能变化大小ΔEk,就能验证机械能是否守恒. 图7 (1)用ΔEp=mgh计算钢球重力势能变化的大小,式中钢球下落高度h应测量释放时的钢球球心到________之间的竖直距离. A.钢球在A点时的顶端 B.钢球在A点时的球心 C.钢球在A点时的底端 (2)用ΔEk=mv2计算钢球动能变化的大小,用刻度尺测量遮光条宽度,示数如图8所示,其读数为________cm.某次测量中,计时器的示数为0.010 0 s,则钢球的速度为v=________m/s. 图8 (3)下表为该同学的实验结果: ΔEp(×10-2 J) 4.892 9.786 14.69 19.59 29.38 ΔEk(×10-2 J) 5.04 10.1 15.1 20.0 29.8 他发现表中的ΔEp与ΔEk之间存在差异,认为这是由于空气阻力造成的.你是否同意他的观点?请说明理由. (4)请你提出一条减小上述差异的改进建议. 答案 (1)B (2)1.50 1.50 (3)不同意 理由见解析 (4)见解析 解析 (1)钢球下落高度h,应测量释放时钢球球心到钢球在A点时的球心之间的竖直距离,故选B. (2)遮光条的宽度d=1.50 cm,钢球的速度v==1.50 m/s (3)不同意,因为空气阻力会造成ΔEk小于ΔEp,但表中ΔEk大于ΔEp. (4)分别测出光电门和球心到悬点的长度L和l,计算ΔEk时,将v折算成钢球的速度v′=v. 变式2 (2018·徐州市考前模拟)某实验小组利用如图9装置来验证机械能守恒定律.在气垫导轨上固定两个光电门,光电门连接数字毫秒计,滑块上固定宽度为d的遮光条.把导轨的右端垫高,测出倾角为θ.已知当地重力加速度为g. 图9 (1)实验时,将滑块从某处由静止释放.滑块遮光条通过某光电门的时间Δt,则滑块通过光电门的瞬时速度为________. (2)若通过光电门1和2的速度分别为v1和v2,还需要测量________(并给这个物理量赋予字母),满足表达式________,说明机械能守恒. (3)完成(2)问所述测量,将滑块从________(选填“同一”或“不同”)位置释放,测出滑块经过光电门1、2的速度v1、v2.以v12为横坐标,以v22为纵坐标,把所得的实验数据描点,得 到一条斜率为________、截距为________的图线,说明机械能守恒. 答案 (1) (2)两光电门间的距离L 2gLsin θ=v22-v12 (3)不同 1 2gLsin θ 变式3 (2018·淮安中学期中)用如图10实验装置验证m1、m2组成的系统机械能守恒.m2从高处由静止开始下落,m1上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机械能守恒定律.图11给出的是实验中获取的一条纸带:0是打下的第一个点,每相邻两计数点间还有4个点(图中未标出),计数点间的距离如图所示.已知m1=80 g,m2=120 g,则:(g取9.8 m/s2,所有结果均保留三位有效数字) 图10 图11 (1)在纸带上打下计数点6时的速度v=________ m/s; (2)在打点0~6过程中系统动能的增量ΔEk=______ J,系统重力势能的减少量ΔEp=_____ J; (3)若某同学作出v2-h图象如图12(v、h分别是纸带上某点对应的速度和上升高度),则当地的实际重力加速度为________ m/s2. 图12 答案 (1)1.14 (2)0.130 0.134 (3)9.64 1.(2018·南通市等七市三模)用图13甲所示的“实验装置验证机械能守恒定律”.气垫导轨上A处安装了一个光电门,滑块上固定一遮光条,滑块用绕过气垫导轨左端定滑轮的细线与钩码相连,每次滑块都从同一位置由静止释放,释放时遮光条位于气垫导轨上B位置的上方. 图13 (1)某同学用游标卡尺测量遮光条的宽度d,如图乙所示,则d=________ mm. (2)实验中,接通气源,滑块静止释放后,由数字计时器读出遮光条通过光电门的时间为t,测得滑块(包括遮光条)质量为M,钩码质量为m,A、B间的距离为L.在实验误差允许范围内,钩码减小的重力势能mgL与__________(用直接测量的物理量符号表示)相等,则机械能守恒. (3)下列不必要的一项实验要求是________(请填写选项前对应的字母). A.滑块必须由静止释放 B.应使滑块(包括遮光条)的质量远大于钩码的质量 C.已知当地重力加速度 D.应使牵引滑块的细线与气垫导轨平行 (4)分析实验数据后发现,系统增加的动能明显大于钩码减小的重力势能,原因是___________ _________________________________________________________________________. 答案 (1)2.75 (2) (3)B (4)气垫导轨右端偏高 2.(2018·南京市学情调研)“验证机械能守恒定律”的实验装置如图14所示. 图14 (1)甲同学按照正确的实验步骤操作后,选出一条纸带如图15所示,其中O点为打点计时器打下的第一个点.从纸带上A点开始每隔一个计时点取一个计数点,取得两个计数点B和 C.该同学用刻度尺测得OA=9.62 cm,OB=15.89 cm,OC=23.64 cm.已知打点计时器每隔0.02 s打一个点,重物的质量为1.00 kg,取g=9.80 m/s2.在OB段运动过程中,重物重力势能的减少量ΔEp=________ J;重物的动能增加量ΔEk=______ J;(结果均保留三位有效数字) 图15 (2)乙同学利用该实验装置测定当地的重力加速度.他打出了一条纸带后,利用纸带测量出了各计数点到打点计时器打下的第一个点的距离h,算出了各计数点对应的速度v,以h为横轴,以v2为纵轴画出了如图16所示的图线.图线明显偏离原点,若测量和计算都没有问题,其原因可能是________. 图16 乙同学测出该图线的斜率为k,如果阻力不可忽略,则当地的重力加速度g ________k(选填“大于”“等于”或“小于”). 答案 (1)1.56 1.54 (2)先释放的重物,再接通的打点计时器电源 大于 3.(2018·沛县中学调研)如图17是“验证机械能守恒定律”的实验.小圆柱由一根不可伸长的轻绳拴住,轻绳另一端固定.将轻绳拉直至水平后由静止释放.在最低点附近放置一组光电门,测出小圆柱运动到最低点的挡光时间Δt,再用游标卡尺测出小圆柱的直径d,重力加速度为g.则: 图17 (1)测出悬点到圆柱重心的距离l,若等式gl=________成立,说明小圆柱下摆过程机械能守恒; (2)若在悬点O安装一个拉力传感器,测出绳子上的拉力F,则验证小圆柱做圆周运动在最低点向心力的公式还需要测量的物理量是________________________(用文字和字母表示),若等式F=______________________成立,则可验证小圆柱做圆周运动在最低点向心力的公式. 答案 (1) (2)小圆柱的质量m mg+m 解析 (1)根据机械能守恒定律应有mgl=mv2,其中v=,解得gl=()2= (2)根据牛顿第二定律有F-mg==m,解得F=mg+m,可见还需要测量小圆柱的质量m,才能求出绳子的拉力. 4.(2018·扬州中学月考)某同学利用如图18所示装置来研究机械能守恒问题,设计了如下实验.A、B是质量均为m的小物块,C是质量为M的重物,A、B间由竖直轻弹簧相连,A、C间由轻质细绳相连.在物块B下放置一压力传感器,重物C下放置一速度传感器,压力传感器与速度传感器相连.当压力传感器示数为零时,就触发速度传感器测定此时重物C的速度.整个实验中弹簧均处于弹性限度内,重力加速度为g.实验操作如下: 图18 (1)开始时,系统在外力作用下保持静止,细绳拉直但张力为零.现释放C,使其向下运动,当压力传感器示数为零时,触发速度传感器测出C的速度为v. (2)在实验中保持A、B质量不变,改变C的质量M,多次重复第(1)步. ①该实验中,M和m大小关系必需满足M__________m(选填“小于”“等于”或“大于”). ②为便于研究速度v与质量M的关系,每次测重物的速度时,其已下降的高度应________(选填“相同”或“不同”). ③根据所测数据,为得到线性关系图线,应作出________(选填“v2-M”“v2-”或“v2-”)图线. ④根据③问的图线知,图线在纵轴上截距为b,则弹簧的劲度系数为________(用题给的已知量表示). 答案 (2)①大于 ②相同 ③v2- ④ 解析 (2)①根据题意,确保压力传感器的示数为零,因此弹簧要从压缩状态到伸长状态,那么C的质量M要大于A的质量m. ②刚要释放C时,弹簧处于压缩状态,mg=k·Δx1 压力传感器示数刚好为零时,弹簧的拉力为F=mg=k·Δx2, 因此弹簧的形变量为Δx=Δx1+Δx2=+=,不论C的质量如何变化,要使压力传感器示数为零,则A上升高度Δx=,C下降高度为Δx,故C下降高度相同. ③选取A、C及弹簧为系统,根据机械能守恒定律,则有:(M-m)g·=(M+m)v2, 整理得,v2=-·+, 为得到线性关系图线,因此应作出v2-图线. ④由上述表达式可知,=b,解得k=.查看更多