- 2021-11-10 发布 |
- 37.5 KB |
- 42页
申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
全国中学生物理竞赛课件9:动量与动量守恒
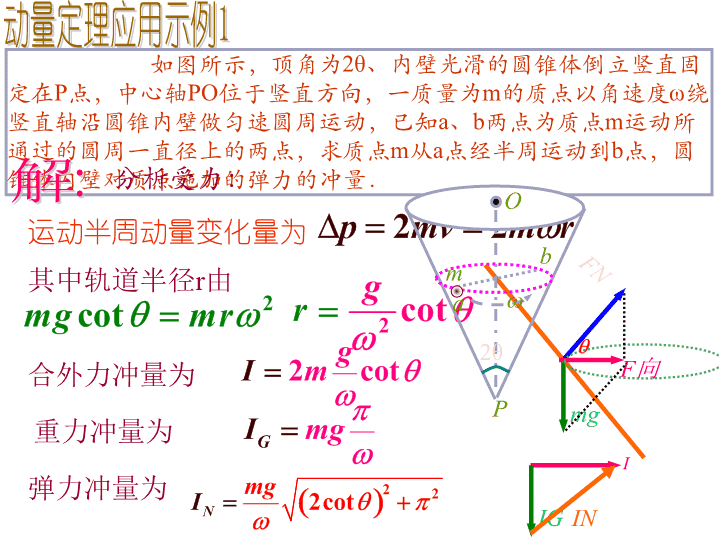
中 国 航 天 CZ 1F ★ I p 0tFt mv mv 动量定理 ♠ 动量定理的应用 ♠ (1)遵从矢量性与独立性原理 (3)尽量取大系统与整过程 i iI p 如图所示,顶角为2θ、内壁光滑的圆锥体倒立竖直固 定在P点,中心轴PO位于竖直方向,一质量为m的质点以角速度ω绕 竖直轴沿圆锥内壁做匀速圆周运动,已知a、b两点为质点m运动所 通过的圆周一直径上的两点,求质点m从a点经半周运动到b点,圆 锥体内壁对质点施加的弹力的冲量.分析受力: mg FN F向 运动半周动量变化量为 2 2 p mv m r 2cotmg mr 2 cotgr 其中轨道半径r由 合外力冲量为 2 cotI gm 重力冲量为 GI mg I IG IN 弹力冲量为 2 22cot NI mg m a b 2θ O ω P 如图所示,质量为M的小车在光滑水平面上以v0向左匀速运动, 一质量为m的小球从高h处自由下落,与小车碰撞后,反弹上升的高 度仍为h.设M>>m,碰撞时弹力FN>>mg,球与车之间的动摩擦因 数为μ,则小球弹起后的水平速度为 A. B. 0 C. D. –v0 2gh 2 2gh M h 小球与车板相互作用,小球动量发生变化:水平方向动量 从0→mvx,竖直方向动量大小不变,方向反向,对小球分别 在竖直、水平方向运用动量定理。 设小球与车板相互作用时 间t,小球碰板前速度vy,由 21 22 y ymv mgh v gh 得 由动量定理 Ff FNN xF t mv 水平方向 2 2xv gh 2 2NF t m gh m gh 直方向竖 m v0 如图所示,滑块A和B用轻线连接在一起后放在水平桌面上, 水平恒力F作用在B上,使A、B一起由静止开始沿水平桌面滑 动.已知滑块A、B与水平桌面之间的动摩擦因数均为μ.力F作用 时间t后A、B连线断开,此后力F仍作用于B.试求滑块A刚刚停住 时,滑块B的速度大小?两滑块质量分别为mA、mB. A B F 设绳断时A、B速度为V,绳断后A运 动时间为T;则在t+T时间内对系统有 A B B BF m m g t T m v 而在t时间内对系统有 A B A BF m m g t m m V 其中 V g T A B A B F m m gT tg m m A B A B B B F m m g Ft m mv m g A B A B F m m g tm m 如图所示,椭圆规的尺AB质量为2m,曲 柄OC质量为m,而套管A、B质量均为M.已知 OC=AC=CB=l;曲柄和尺的重心分别在其中点上;曲柄绕 O轴转动的角速度ω为常量;开始时曲柄水平向右,求:曲 柄转成竖直向上过程中,外力对系统施加的平均冲量. C B A O 确定曲柄m、尺2m、套管A、B 质心的速度,确定质点系的动量 变化,对系统运用动量定理 曲柄、尺的质心及套管A、B的速度相关关系如示 C B A O t v 曲柄质心速度 2 lv Cv 尺质心速度 cv l 套管A速度 Cv Anv Av 套管B速度 Cv Anv 2 m lp 动量 动量 2cp m l 2ABp M l 系统动量大小不变为 5 22p m M l 0p tp 由动量定理,在从水平变成竖直过程中 0tI p p p 52 22 m M l 如图所示,光滑的水平面上停着一只木球 和载人小车,木球质量为m,人和车总质量为M,已知 M∶ m=16∶ 1,人以速率v沿水平面将木球推向正前方的固 定挡板,木球被挡板弹回之后,人接住球后再以同样的对 地速率将球推向挡板.设木球与挡板相碰时无动能损 失.求人经过几次推木球后,再也不能接住木球? 对木球与载人小车这个系统, 动量从初时的0,到最终末动 量至少为(M+m)v,是墙对 木球冲量作用的结果: 2n mv m M v 17 2 n 经9次推木球后,再也接不住木球 一根均匀的不可伸缩的软缆绳全长为l、质 量为M.开始时,绳的两端都固定在邻近的挂钩上,自由 地悬着,如图(甲).某时刻绳的一端松开了,缆绳开始 下落,如图(乙),每个挂钩可承受的最大负荷为FN(大 于缆绳的重力Mg),为使缆绳在下落时,其上端不会把挂 钩拉断,Mg与FN必须满足什么条件?假定下落时,缆绳 每个部分在达到相应的最终位置之后就都停止不动. 甲 乙 x xA B C 松开左缆绳,自由下落h时,左侧绳速度为 挂钩所受的力由两部分组成:一是承静止悬挂在 钩下的那部分缆绳的重;一是受紧接着落向静止 部分最下端的绳元段的冲力F,挂钩不被拉断,这 两部分力的总和不得超过钩的最大负荷 2gh 研究左边绳处于最下端的极小段绳元Δx:受右 边静止绳作用,使之速度在极短时间Δt内减为0, 由动量定理 F t m v 2 2 ghv 因时间极短内,忽略重力冲量,元段的平均速度取 2 22 ghMF t t ghl hF Mg l 当左边绳全部落下并伸下时,h=l F Mg 挂钩不断的条件是 2NF Mg> 0Lx nn 一根铁链,平放在桌面上,铁链每单位长度的质量为 λ.现用手提起链的一端,使之以速度v竖直地匀速上升,试求在从 一端离地开始到全链恰离地,手的拉力的冲量,链条总长为L. 图示是链的一微元段离地的情景,该段微元长 F Δx 该段微元质量 m x 设该元段从静止到被提起历时Δt, 那么竖直上升部分长x的链条在手的拉 力F、重力的冲量作用下,发生了末段 微元动量的变化,由动量定理: gF x t m v 2g= xF x v vt 2 gF v x 2gvt v 0, Lt v 力随时间线性变化,故可用算术平均力求整个过程手拉力F的总冲量: 2 1 2 LI v gL v 2 2 gL Lvv 如图所示,水车有一孔口,水自孔口射出.已知水面 距孔口高h,孔口截面积为a,水的密度为ρ.若不计水车与地面的摩 擦,求水车加于墙壁的水平压力. h 先求水从孔口射出的速度v 21 2gha x a x v 对处于孔口的一片水由动能定理: 2v gh 对整个水车,水平方向受墙壁的压力F,在时间Δt内有质量为 2gh t a 的水获得速度 2gh 由动量定理: 2 2F t gh t a gh 2F ahg 水车加于墙壁的压力是该力的反作用力 ,大小为 2 hF a g 逆风行船问题: 如图,帆船在逆风的情况 下仍能只依靠风力破浪航行.设风向从B向A,.位于A 点处的帆船要想在静水中最后驶达目标B点,应如何操纵 帆船?要说明风对船帆的作用力是如何使船逆风前进达 到目标的. A B 风向设计如示航线 风向 F 风 对帆F1 F2航线 船帆 A B φ 航向与风向成θ角 风吹到帆面,与帆面发生弹性碰撞后以同样的反射 角折回.风与帆的碰撞,对帆面施加了一个冲量, 使船受到了一个方向与帆面垂直的压力F,这个力 沿船身方向及垂直于船身方向的分力F1和F2,F2正 是船沿航线前进的动力,F1则有使船侧向漂移的作 用,可以认为被水对船的横向阻力平衡. 风帆与船行方向成φ角 只要适时地改变 船身走向,同时 调整帆面的方位, 船就可以依靠风 力沿锯齿形航线 从A驶向B. 续解 Δmv 设帆面受风面积为S,空气密度为ρ,风速为v,在Δt时间内到达帆面并被反弹的空气质量是 F2 F1 F 风 对帆 Δmv Δp Δm φ sinm v t S 反弹空气动量变化量 2 sin sinp v t S v 2 22 sinS v t 由动量定理,帆(船)对风的冲力 2 22 sinF t S v t 帆(船)受到的前进动力F2为 2 2 22 sin sinS vF φ 将风即运动的空气与帆面的碰撞简化为弹性碰撞! 船沿航线方向的动力大小与扬帆方向有关,帆面与 船行方向的夹角φ适当,可使船获得尽大的动力. 设风筝面与水平成θ角,风对 风筝的冲力为F,其中作为风 筝升力的分量为Fy,风筝面积 为S,右图给出各矢量间关系 放风筝时,风沿水平方向吹来,要使风筝得到最大上 升力,求风筝平面与水平面的夹角.设风被风筝面反射后的方向遵 守反射定律. mv mΔv F Fy θ sinm vt S mv 风筝截面 22 sin cos 90F t v S 2 22 sin cosyF v S 4 2 2 2 sin cos2 2Sv 22 2 22 2 1 cos cosSv 根据基本不等式性质 2 2 12cos 1 cos , cos 3 当 时 max 24 3 9yF F Sv 由动量定理: 反冲模型 ♠ M m ※系统总动量为零 ※平均动量守恒 2 21 1 2 2kE mv MV 在系统各部分相互作用过程的各瞬间,总有 1 2 1 2 m mS Sv v t t : : 1 1 2 20 m v m v 21 1 20 m v m v 1 1 2 20 m mm s m s ※常以位移表示速度 ※须更多关注“同一性”与“同时 性”“同一性”:取同一惯性参考系描述m1、m2的动量 “同时性”:同一时段系统的总动量守恒 O x S人 一条质量为M、长为L的小船静止在平静的 水面上,一个质量为m的人站立在船头.如果不计水对 船运动的阻力,那么当人从船头向右走到船尾的时候, 船的位移有多大? 设船M对地位移为x,以向右方向为正,用 位移表速度,由 0 m L x Mx x m Lm M “-”表示船的位移方向向左 人对船的位移 向右取正 船对地的位移 ±未知待求 运算法则 如图所示,质量为M、半径为R的光滑圆环静止 在光滑的水平面上,有一质量为m的小滑块从与O等高处 开始无初速下滑,当到达最低点时,圆环产生的位移大 小为________. R 设圆环位移大小为x,并以向左为正: m M O R x R 0 m R x Mx 有 mx RM m 即 “-”表示环位移方向向 右 m RM m 气球质量为M,下面拖一条质量不计的软梯,质量为m 的人站在软梯上端距地面高为H,气球保持静止状态,求⑴人能安全 到达地面,软梯的最小长度;⑵若软梯长为H,则人从软梯下端到上 端时距地面多高? H L-汽球相对人 上升高度即绳 梯至少长度 0 mH M L H ⑴以向下为正,用位移表速度 L M m HM H 人上升高度h ⑵以向上为正,用位移表速度, 0 mh M H h h M HM m 如图所示浮动起重机(浮吊)从岸上吊起 m=2 t的重物.开始时起重杆OA与竖直方向成60°角, 当转到杆与竖直成30°角时,求起重机的沿水平方向的 位移.设起重机质量为M=20 t,起重杆长l=8 m,水的阻 力与杆重均不计. 水平方向动量守恒,设右为正,起重机位移x 6030 0 sin60 sin30Mx m l x 0.266mx 重物对起重机水 平位移 x 设右为正,梯形木块位移x, 系统水平方向动量守恒: 1 2 30 cos60m M x m h x m h x 0.15mx 如图所示,三个重物m1=20 kg, m2=15 kg,m3=10 kg,直角梯形物块M=100 kg.三重物由一绕过两个定滑轮P和Q的绳 子相连.当重物m1下降时,重物m2在梯形物块的上面向右移动,而 重物m3则沿斜面上升.如忽略一切摩擦和绳子质量,求当重物m1下 降1m时,梯形物块的位移. m1 m2 m 3 M P Q 60 M 典型情景: vm m vm m M vM M mvm MF m F vm 2 2 0 1 1 2 2m m t mFs m v m v 2 2 0 1 1 2 2M Mt MFs Mv Mv - 2 2 2 2 0 0 1 1 1 1( ) ( )2 2 2 2M m mt Mt MF s s mv Mv mv Mv [“一对力的功”用其中一个力的大小与两物体相对位移的乘积来计算] 模型特征:由两个物体组成的系统,所受合外力为零而相互作用力为一对恒力. 规律种种: ⑴动力学规律 两物体的加速度大小与质量成反比. ⑵运动学规律 两个做匀变速运动物体的追及问题或相对运动问题. ⑶动量规律 系统的总动量守恒. ⑷能量规律 力对“子弹”做的功等于“子弹”动能的增量: 力对“木块”做功等于“木块”动能增 量: 一对力的功等于系统动能增量: 图象1 图象2 图象描述 “子弹”穿出”木块” “子弹”迎击”木块”未穿出 vm vmt vM t d t v 0 t0 1tan f m 1tan f M t v 0 vm vM m Mmv Mv M m 1tan f m 1tan f M d 图象描述 “子弹”未穿出”木块” “子弹”与”木块”间作用一对恒力 vm ≤d t v 0 t0 1tan f m 1tan f M t v 0 vm mmv M m 1tan f m 1tan f M Δ s m mmv M m t0 v 如图所示,长为L的木板A右边固定着一个挡板, 包括挡板在内的总质量为1.5M,静止在光滑水平面上,有 一质量为M的小木块B,从木板A的左端开始以初速度v0在 木板A上滑动,小木块B与木板A间的摩擦因数为μ小木块B 滑到木板A 的右端与挡板发生碰撞.已知碰撞过程时间极 短,且碰后木板B恰好滑到木板A的左端就停止滑动.求: ⑴若 在小木块B与挡板碰撞后的运动过程中,摩擦 力对木板A做正功还是做负功?做多少功?⑵讨论木板A和 小木块B在整个运动过程中,是否有可能在某段时间里相对 地面运动方向是向左的?如果不可能,说明理由;如果可 能,求出能向左滑动,又能保证木板A和小木块B刚好不脱 离的条件. 2 03 ,160 vL g 这是典型的“子弹打木块”模型:A、B间相互作用着一 对等大、反向的摩擦力Ff=μMg而系统不受外力,它的变化在 于过程中发生一系统内部瞬时的相互碰撞.小木块B与挡板碰 撞前、后及整个过程均遵从动量守恒规律;A、B两者加速度 大小与质量成反比;碰撞前木块“追”木板,碰撞后则成木板 “追”木块 . L B A v0 系统运动v-t图 t1 t 1 + t2 v0 B A V L A B L 2 3A Bg ga a 由系统全过程动量守恒 0 1.5Mv M M V 0 2 5 V v 续解 AV 由图象求出B与挡板碰后时间t2: 2 2 2 2 1 1 5 2 2 3A BL t t a a t g 2 6 5 t L g得 查阅 碰后板A的速度VA: 2 2 3AV V g t 0 2 v v-t图 由动能定理,摩擦力在碰后过程中对木板A做的功 2 2 0 0 1 21.52 5 4f vW M v 2 0 27 400 Mv B能有向左运动的阶段而又刚好不落下A板应满足两个条件: 一是B与挡板碰后B速度为负: 0 2 2 05BV v g t < 2 02 15 v gL > 一是一对摩擦力在2L的相对位移上做的功不大于系统动能的增量,即 : 2 2 0 0 1 1 5 22 2 2 2 5mg l Mv M v 2 03 20 v gL 2 2 0 02 3 15 20Lv v g g <当 时木块B可在与挡板碰撞后的一段时间内相对 地面向左运动并刚好相对静止在板A的左端 推证两光滑物体发生弹性碰撞时,接近速度 与分离速度大小相等,方向遵守“光反射定律”,即入射 角等于反射角. 如图,设小球与平板均光滑,小球与平板发生完全弹性碰撞,木板质量为M,小球 质量为m,沿板的法向与切向建立坐标系,设碰撞前,板的速度为V,球的速度为v, 碰撞后,分别变为 V v 和 x y 0 V v ∵两者发生完全弹性碰撞,系统同时满足动量与动 能守恒: x x x xMV mv MV mv 2 2 2 2 2 2 2 21 1 1 1 2 2 2 2x y x y x y x yM V V m v v M V V m v v y y y yV V v v x x xxM V V m v v 2 2 2 2 2 2 2 2 x y x y x y x yM V V V V m v v v v 两式相除 x x x xV V v v x x x xv V v V 球与木板的接近速度与分离速度大小相等 方向: tan tany y y y x x x x v V v V v V v V 弹弓效应 如图,质量为m的小球放在质量为M的大球顶上,从 高h处释放,紧挨着落下,撞击地面后跳起.所有的碰撞 都是完全弹性碰撞,且都发生在竖直轴上.⑴小球弹起可 能达到的最大高度?⑵如在碰撞后,物体M处于平衡,则 质量之比应为多少?在此情况下,物体m升起的高度为多 少? h 大球刚触地时两球速度v均为 2v gh , 大球与地完全弹性碰撞,速度变为 2v gh 相对大球,小球以2v速度向下接近大球,完 全弹性碰撞后以2v速度向上与大球分离! 小球与大球碰撞后对地速度变为 3 2V gh对小球,由机械能守恒 21 3 22 mm gh mgH 9mH h M m⑴当 时 ⑵若碰后大球处于平衡, 则 2Mv mv m v 3:M m 21 2 22 m gh mgH由 4H h 如图所示,AB部分是一光滑水平面,BC部分是倾角 为θ(0<θ≤90 °)的光滑斜面(θ=90°时为竖直面).一条伸直 的、 长为l的匀质光滑柔软细绳绝大部分与B棱垂直地静止在AB面上, 只是其右端有极小部分处在BC面上,于是绳便开始沿ABC下滑. ⑴ 取θ=90°,试定性分析细绳能否一直贴着ABC下滑直至绳左端到达 B?⑵事实上,对所给的角度范围(0<θ≤90 °), 细绳左端到 B棱尚有一定距离时,细绳便会出现脱离ABC约束(即不全部紧贴 ABC)的现象.试求该距离x. A B C ⑴θ=90° x 1T l x x x xF mg mgl l l l 细绳贴着ABC下滑,到达B处的绳元水平速度 越来越大,这需要有更大的向左的力使绳元的水 平动量减为零,但事实上尚在水平面上的绳段对 到达B处的绳元向左的拉力由力的加速度分配法 可知随着下落段x增大,FT先增大后减小! 细绳做不到一直贴着ABC下滑直至绳左端到达B C 当 时, 2 4Tm l mgx F 续解 A B θ C ⑵设有x长的一段绳滑至斜面时绳与棱B间恰无作用,此时绳的速度设为v,则由机械 能守恒: x v vFTΔmg FT 21sin2 2 x xmg mvl singx lv 考察处在B处的微元绳段Δm受力: cos cos 1T T v tF F t mvl 微元段Δm在水平冲量作用下水平动量由Δmv变为Δmvcosθ sinT l x xF mgl l 由动量定理 其中 2x l 即细绳左端到B棱尚有一半绳长的距离时,细 绳便会出现不全部紧贴ABC的现象 ! 质量为0.1 kg的皮球,从某一高度自由下落到水平地 板上,皮球与地板碰一次,上升的高度总等于前一次的0.64倍.如果 某一次皮球上升最大高度为1.25 m时拍一下皮球,给它一个竖直向下 的冲力,作用时间为0.1 s, 使皮球与地板碰后跳回前一次高度.求 这个冲力多大? 球与地碰撞恢复系数 0.64 0.81e 某一次,皮球获得的初动能 2 2k FtE m 落地时速度由 2 2 2 1 1 2 1 22 2 Ft Ftmv mgh v ghm m 起跳时速度 2 2v gh 则 2 2 2 2 gh e Ftgh m 代入数据得 2 2 2 5 0.8 0.125 0.1 F N3.75F 一袋面粉沿着与水平面倾斜成角度α=60°的光滑斜 板上,从高H处无初速度地滑下来,落到水平地板上.袋与地板之间 的动摩擦因数μ=0. 7,试问袋停在何处?如果H=2 m,α=45°, μ=0.5,袋又将停在何处? 本题要特别关注从斜板到水平地板的拐点,袋的 动量的变化及其所受的摩擦力与支持力冲量情况. 在μ=0.7 α= 60°情况下 p cos60xp p sin60yp p 60 2p m gH 到水平板时两个方向动量减为零所需冲量可由动量定理确定: f x x N y y F t p F t p cos60 sin60 x y t p t p 3 0.7 3 1< 即水平分量先减为零! ∴袋就停在斜面底端 在μ=0.5 α= 45°情况下 cos45 sin45 x y t p t p 1 0.5 1> 竖直分量先减为零! 续解 竖直分量减为0时,水平动量设为px′,则由动量定理 y x xp p p 2 sin45 2 cos45 xm gH m gH p 2x Hp m g 袋将离开斜板底端,在水平地板滑行S后停止,由动能定理 2 2 8 xp mgHmgS m m0.54 HS 得 袋将停在水平地板上距斜板底端0.5m处 一球自高度为h的塔顶自由下落,同时,另一完全相 同的球以速度 自塔底竖直上抛,并与下落的球发生正碰. 若两球碰撞的恢复系数为e,求下落的球将回跃到距塔顶多高处? 2v gh 两球相对速度(亦即接近速度) 2gh 到两球相遇历时 2 ht gh 此时两球速率相同 1 2 2 ghv v 上球下落了 2 1 1 2h gt 4 h 2 1 2 1 v ve v v 由牛顿碰撞定律 碰后两球分离速度 2 1 2v v e gh ∵两球完全相同 2 1 2 ghv v e 设回跳高度距塔顶H,由机械能守恒 2 22 4 gh he g H 214H h e 如图所示,定滑轮两边分别悬挂质量是2m和m的重 物A和B,从静止开始运动3秒后,A将触地(无反跳).试求从A第一次 触地后:⑴经过多少时间,A将第二次触地?⑵经过多少时间系统停 止运动? ⑴整个系统一起运动时 3 3 2mg mga g m 初时质量为2m的物块A离地高度 m2 132 151h tg A着地后,绳松,B以初速度 v1=at1=10m/s竖直上抛 经 s12 2v g 落回原处并将绳拉紧! 此瞬时A、B相互作用,B被拉离地面,由动量守恒 2m 1 1 1 2 23 3 3 v atmv mv v 此后,两者以v2为初速度、a=g/3做匀变速运动(先反时针匀减 速、后顺时针匀加速),回到初位置即A第二次触地须经时间 m s2 1 22 2 3 / 3 v vt a g 则A的第一、二次着地总共相隔 1 1 12 2 4v v v g g g s4 续解 ⑵第二次着地时两物块的速度 1 2 2 3 vv v A再次被拉离地面时两物块的速度由 A着地后,绳松,B以初速度 v1/3竖直上抛,经 12 3 v g 落回原处 并将绳拉紧! 1 1 3 3 233 3 v vm mv v 此后,两者以v3为初速度、a=g/3做匀变速运动(先反时针匀减 速、后顺时针匀加速),A第三次触地须经时间 3 1 1 22 2 23 / 3 3 v v vt a g g 则A的第二、三次着地总共相隔 1 1 1 2 32 2 43 3 3 v v v g g g 以此类推,到第n次着地时 1 24lim 3nn vT g 2 11 34lim 11 3 n n s6 自开始运动到最终停止共用 s0 9T t 查阅 如图所示,质量为m1、m2的物体,通过轻绳挂在双 斜面的两端.斜面的质量为m,与水平面的夹角为α1和α2,整个系统 起初静止,求放开后斜面的加速度和物体的加速度.斜面保持静止 的条件是什么?忽略所有摩擦. m1 m α1 α2 m2 设斜面加速度为a,而物体对斜面的加速度为a0 aa0 a2 a0a1 Xa 在所设坐标方向上 a 1 0 1 2 0 20 cos cosm a a m a a ma 由系统水平方向动量守恒 对m1、m2分别列出动力学方程 m1a T m1g N1 m2a T m2g N2 1 1 1 1 1 0sin cosT m g ma ma a 由上三式解得 1 1 2 2 1 1 2 2 2 1 1 2 2 1 2 1 2 cos cos sin sin cos cos m m m m g m m m m m m m 续解 2 2 2 2 2 0sin cosm g T m a m a 1 2 1 1 2 2 0 2 1 1 2 2 1 2 1 2 sin sin cos cos m m m m m ga m m m m m m m 而 2 2 1 1 2 2 1 2 1 1 2 2 1 2 1 1 2 2 1 2 1 1 2 2 1 1 1 2 2 sin sin cos cos 2 cos cos cos cos cos m m m m m m m m m m m m g m m m m m m a m 2 2 1 1 2 2 1 2 1 1 2 2 1 2 1 1 2 2 2 2 1 1 2 2 1 2 1 2 2 sin sin cos cos 2 cos cos cos cos cos m m m m m m m m m m m m g m m m m m m a m 当a=0,即 1 1 2 2sin sin 0m m 斜面静止! 时1 2 2 1 sin sin m m 查阅 小滑块A位于光滑的水平桌面上,小滑块B处在位于 桌面上的光滑小槽中,两滑块的质量都是m,并用长L、不可伸长、 无弹性的轻绳相连,如图.开始时A、B间的距离为L/2,A、B间连 线与小槽垂直.今给滑块A一冲击,使其获得平行于槽的速度v0,求 滑块B开始运动时的速度. v0 B A 当轻绳刚拉直时滑块A速度由 v0变为vA,速度增量沿绳方向, 滑块B速度设为vB,沿槽;各 速度矢量间关系如图, 其中vn表 示A对B的转动速度. v n vA vB Δv A B vB沿槽方向系统动量守恒: 0 cosB Amv mv mv 又由图示矢量几何关系有 : 30 30 0 sin 30 sin30 Av v α v0 sin60 sin 60 A Bv v 0 0 3tan 3 B B v v v v 0 cos 3 tanA vv 0 0 1 3tanB vv v 0 3 7Bv v 0 0 0 31 3 B B B vv v v v v 0 0 0 3 4 B B v v vv v 如图所示,将一边长为l、质量为M的正方形平板放 在劲度系数为k的轻弹簧上,另有一质量为m(m<M)的小球放在一 光滑桌面上,桌面离平板的高度为h.如果将小球以水平速度v0抛出 桌面后恰与平板在中点O处做完全弹性碰撞,求: ⑴小球的水平初速 度v0应是多大? ⑵弹簧的最大压缩量是多大? M k v0 O m h ⑴设球对板的入射速度v方向与竖直成θ, 大小即平抛运动末速度 v 2gh 2 cos ghv 平抛运动初速度 tantan 2 4 l h 而 0 2 tanv gh 则 0 2 4 lgh hv ⑵根据弹性碰撞性质,设球与板碰后速度变为v′, 板速度为V ,球离开板时对板的速度大小为v, 方向遵守反射定律,矢量关系如图示: v xv yv v V sin cos x y v v v v V 由图示关系 由动能守恒 2 2 2 21 1 1 2 2 2x ymv m v v MV 2 2 21 1 1sin cos2 2 2m v m v V MV 2 cosmV vM m 得 2 2m gh M m 此后板在运动中机械能守恒,可得板向下运动 2 21 1 2 2kx MV 2 2m Mgh M mx k 则弹簧总压缩量为 2 2Mg m Mgh k M m kl 物体以速度v0=10m/s从地面竖直上抛,落地时速度 vt=9 m/s,若运动中所受阻力与速度成正比,即f=kmv,m为物体的 质量,求物体在空中运动时间及系数k. 本题通过元过程的动量定理,用微元法求得终解! 本题研究过程中有重力冲量与阻力冲量,其中阻 力冲量为一随时间按指数规律变化的力! 设上升时间为T,取上升过程中的某一元过程:该过程小球上升了T/n(n→ ∞)时间,速度从vi减少为vi+1,各元过程中的阻力可视为不变为 fi iF kmv i iF mg kmv 合外力 根据动量定理,对该元过程有 1i i i Tmg kmv m v vn 即 1i i i v v T g kv n 对该式变形有 1i i i g kv g kv kT g kv n 1ig kv 11 i i g kv kT g kv n 1 1i i g kv kT g kv n 在各相同的上升高时间T/n微元中,合外力大小成等比数 列递减、因而动量的增量是成等比数列递减的,其公比为 续解 则 1 1 n n i i g kv kT g kv n 1 n kTkTkT n 对上式两边取极限: 1lim lim 1 nn kTkTi n ni g kv kT g kv n 0kv 0 10 kT ge g k 1 10ln gT k k g 0i TmgT km v mvn 上升过程的动量定理表达为: 上升高度 同理,对下落T′过程由 1i i i Tmg kmv m v vn 1 1i i g kv kT g kv n 对此式两边取n次方当n→∞极限: 续解 1lim lim 1 nn kTkTi n ni g kv kT g kv n 0 tkv kT t g eg kv 1 ln 9 gT k g k i t TmgT km v mvn 下落过程的动量定理表达为: 下落高度 查阅 上、下落过程的动量定理表达式相加为: 0tmg T T m v v 0tv vT T g 1.9 s t T T 1 10ln 9 g k k g k 1.9 -10.058 sk 上、下落过程的时间表达式相加为: 如图所示,四个质量均为m的质点,用同样长度且 不可伸长的轻绳联结成菱形ABCD,静止放在水平光滑的桌面上.若 突然给质点A一个历时极短沿CA方向的冲击,当冲击结束的时刻, 质点A的速度为v,其它质点也获得一定的速度,∠BAD=2α(α< π/4).求此质点系统受冲击后所具有的总动量与总动能. A B C D 2αv v D v C v vn v C vn D点速度与A点速度及C 点速度相关关系如示: 图 2 sinc nv v v 由 知 I1 I2 设AD绳上力的冲量为I1,CD绳上力的 冲量为I2,则由动量定理 1 2 cos DxI I mv x y 1 2 sin DyI I mv 对质点D 2 cv vm 22 cos cI mv cot2 cv vm 对质点C 2 cos2 1 2sinc vv 2 2 c c v vp m v v 2 4 1 2sin mv 2 2 21 2 cot2 2 c c v vE m v v 2 2 2 1 2 sin mv 查看更多