- 2021-06-16 发布 |
- 37.5 KB |
- 10页

申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
【数学】2018届一轮复习北师大版参数方程学案
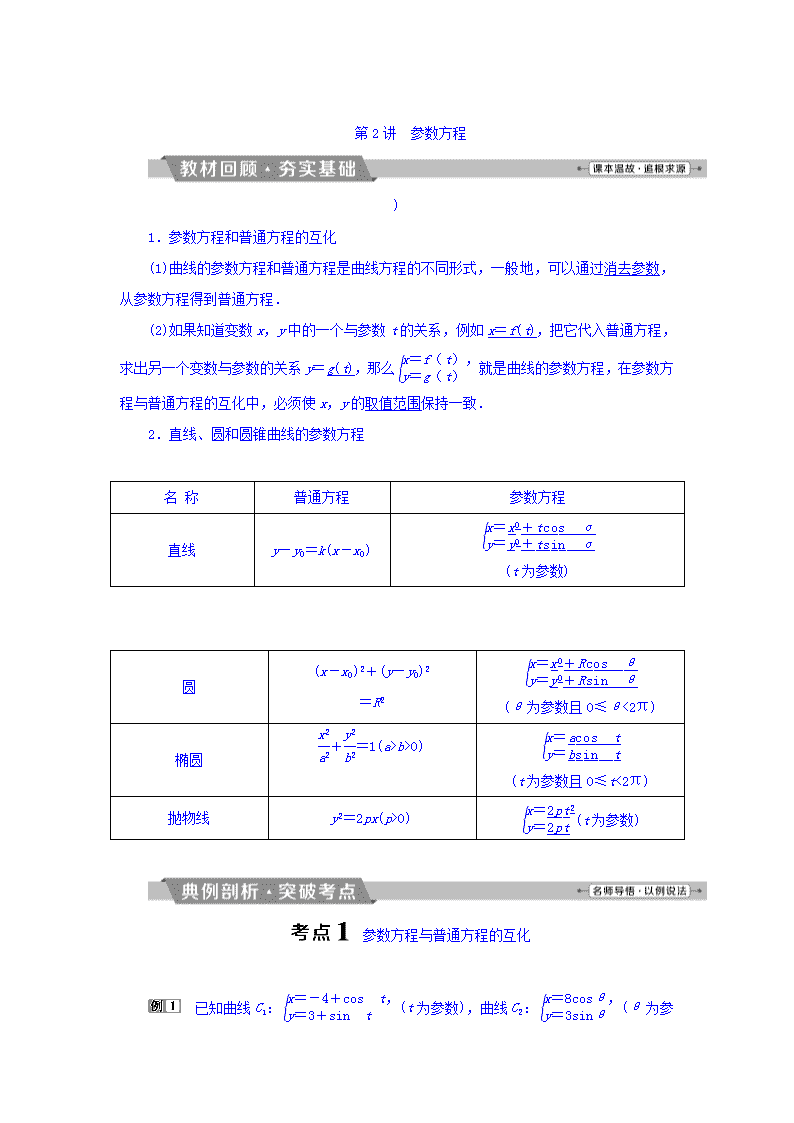
第2讲 参数方程 ) 1.参数方程和普通方程的互化 (1)曲线的参数方程和普通方程是曲线方程的不同形式,一般地,可以通过消去参数,从参数方程得到普通方程. (2)如果知道变数x,y中的一个与参数t的关系,例如x=f(t),把它代入普通方程,求出另一个变数与参数的关系y=g(t),那么就是曲线的参数方程,在参数方程与普通方程的互化中,必须使x,y的取值范围保持一致. 2.直线、圆和圆锥曲线的参数方程 名 称 普通方程 参数方程 直线 y-y0=k(x-x0) (t为参数) 圆 (x-x0)2+(y-y0)2 =R2 (θ为参数且0≤θ<2π) 椭圆 +=1(a>b>0) (t为参数且0≤t<2π) 抛物线 y2=2px(p>0) (t为参数) 参数方程与普通方程的互化 已知曲线C1:(t为参数),曲线C2:(θ 为参数).化C1,C2的方程为普通方程,并说明它们分别表示什么曲线. 【解】 曲线C1:(x+4)2+(y-3)2=1,曲线C2:+=1, 曲线C1是以(-4,3)为圆心,1为半径的圆; 曲线C2是中心为坐标原点,焦点在x轴上,长半轴长是8,短半轴长是3的椭圆. 将参数方程化为普通方程的方法 (1)将参数方程化为普通方程,需要根据参数方程的结构特征,选取适当的消参方法.常见的消参方法有:代入消参法、加减消参法、平方消参法等.对于含三角函数的参数方程,常利用同角三角函数关系式消参,如sin2θ+cos2θ=1等. (2)将参数方程化为普通方程时,要注意两种方程的等价性,不要增解. 将下列参数方程化为普通方程. (1) (2) (1)两式相除,得k=, 将其代入得x=, 化简得所求的普通方程是4x2+y2-6y=0(y≠6). (2)由(sin θ+cos θ)2=1+sin 2θ=2-(1-sin 2θ),x=1-sin 2θ∈,得y2=2-x. 即所求的普通方程为y2=2-x,x∈. 参数方程的应用 (2017·兰州市实战考试)在平面直角坐标系xOy中,直线l的参数方程为(t为参数).在以原点O为极点,x轴正半轴为极轴的极坐标系中,圆C的方程为ρ=2sin θ. (1)写出直线l的普通方程和圆C的直角坐标方程; (2)若点P坐标为(3,),圆C与直线l交于A、B两点,求|PA|+|PB|的值. 【解】 (1)由得直线l的普通方程为x+y-3-=0. 又由ρ=2sin θ得圆C的直角坐标方程为x2+y2-2y=0, 即x2+(y-)2=5. (2)把直线l的参数方程代入圆C的直角坐标方程,得 +=5,即t2-3t+4=0. 由于Δ=(3)2-4×4=2>0,故可设t1、t2是上述方程的两实数根, 所以t1+t2=3,t1·t2=4. 又直线l过点P(3,),A、B两点对应的参数分别为t1、t2, 所以|PA|+|PB|=|t1|+|t2|=t1+t2=3. (1)解决与圆、圆锥曲线的参数方程有关的综合问题时,要注意普通方程与参数方程的互化公式,主要是通过互化解决与圆、圆锥曲线上与动点有关的问题,如最值、范围等. (2)根据直线的参数方程的标准式中t的几何意义,有如下常用结论: 过定点M0的直线与圆锥曲线相交,交点为M1,M2,所对应的参数分别为t1,t2. ①弦长l=|t1-t2|; ②弦M1M2的中点⇒t1+t2=0; ③|M0M1||M0M2|=|t1t2|. 已知直线l:(t为参数),曲线C1:(θ为参数). (1)设l与C1相交于A,B两点,求|AB|; (2)若把曲线C1上各点的横坐标压缩为原来的,纵坐标压缩为原来的,得到曲线C2,设点P是曲线C2上的一个动点,求它到直线l的距离的最小值. (1)l的普通方程为y=(x-1),C1的普通方程为x2+y2=1. 联立方程,解得l与C1的交点为A(1,0),B,则|AB|=1. (2)C2的参数方程为(θ为参数). 故点P的坐标是. 从而点P到直线l的距离d==,当sin=-1时,d取得最小值,且最小值为(-1). 极坐标方程与参数方程的综合问题 (2017·张掖市第一次诊断考试)已知直线l的参数方程为(t为参数),以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,圆C的极坐标方程为ρ=4sin. (1)求圆C的直角坐标方程; (2)若P(x,y)是直线l与圆面ρ≤4sin的公共点,求x+y的取值范围. 【解】 (1)因为圆C的极坐标方程为ρ=4sin, 所以ρ2=4ρsin=4ρ, 所以圆C的直角坐标方程为x2+y2=2y-2x, 即(x+1)2+(y-)2=4. (2)设z=x+y, 圆C的圆心是(-1,),半径是2, 将代入z=x+y,得z=-t. 又因为直线l过C(-1,),圆C的半径为2,所以-2≤t≤2, 所以-2≤-t≤2,即x+y的取值范围是. 涉及参数方程和极坐标方程的综合问题,求解的一般方法是分别化为普通方程和直角坐标方程后求解.当然,还要结合题目本身特点,确定选择何种方程. 极坐标系与直角坐标系xOy有相同的长度单位,以原点为极点,以x轴正半轴为极轴,曲线C1的极坐标方程为ρ=4cos θ(ρ≥0),曲线C2的参数方程为(t为参数,0≤α<π),射线θ=φ,θ=φ+,θ=φ-与曲线C1分别交于(不包括极点O)点A、B、C. (1)求证:|OB|+|OC|=|OA|; (2)当φ=时,B、C两点在曲线C2上,求m与α的值. (1)证明:依题意|OA|=4cos φ, |OB|=4cos ,|OC|=4cos , 则|OB|+|OC|=4cos+4co s =2(cos φ-sin φ)+2(cos φ+sin φ) =4cos φ=|OA|. (2)当φ=时,B、C两点的极坐标分别为、,化为直角坐标为B(1,)、C(3,-),所以经过点B、C的直线方程为y-=-(x-1),而C2是经过点(m,0)且倾斜角为α的直线,故m=2,α=. 1.(2016·高考江苏卷)在平面直角坐标系xOy中,已知直线l的参数方程为(t为参数),椭圆C的参数方程为(θ为参数).设直线l与椭圆C相交于A,B两点,求线段AB的长. 椭圆C的普通方程为x2+=1. 将直线l的参数方程代入x2+=1,得 +=1, 即7t2+16t=0,Ziyuan ku.com 解得t1=0,t2=-. 所以AB=|t1-t2|=. 2.(2017·广东珠海 模拟)在极坐标系中,圆C的极坐标方程为ρ2=4ρ(cos θ+sin θ)-6.若以极点O为原点,极轴所在直线为x轴建立平面直角坐标系. (1)求圆C的参数方程; (2)在直角坐标系中,点P(x,y)是圆C上一动点,试求x+y的最大值,并求出此时点P的直角坐标. (1)因为ρ2=4ρ(cos θ+sin θ)-6, 所以x2+y2=4x+4y-6, 所以x2+y2-4x-4y+6=0, 即(x-2)2+(y-2)2=2为圆C的直角坐标方程. 所以所求的圆C的参数方程为(θ为参数). (2)由(1)可得x+y=4+(sin θ+cos θ) =4+2sin. 当θ=, 即点P的直角坐标为(3,3)时, x+y取得最大值,为6. 3.(2015·高考陕西卷)在直角坐标系xOy中,直线l的参数方程为(t为参数).以原点为极点,x轴正半轴为极轴建立极坐标系,⊙C的极坐标方程为ρ=2sin θ. (1)写出⊙C的直角坐标方程; (2)P为直线l上一动点,当P到圆心C的距离最小时,求P的直角坐标. (1)由ρ=2sin θ,得ρ2=2ρsin θ, 从而有x2+y2=2y, 所以x2+(y-)2=3. (2)设P,又C(0,), 则|PC|= =, 故当t=0时,|PC|取得最小值, 此时,点P的直角坐标为(3,0). 4.(2017·合肥市第一次教学质量检测)已知直线l:(t为参数),以坐标原点为极点,x轴的非负半轴为极轴建立极坐标系,曲线C的极坐标方程为ρ2-2ρsin θ=a(a>-3). (1)将曲线C的极坐标方程化为直角坐标方程; (2)若曲线C与直线l有唯一公共点,求a的值. (1)由ρ2-2ρsin θ=a知其直角坐标方程为 x2+y2-2y=a, 即x2+(y-)2=a+3(a>-3). (2)将l:代入曲线C的直角坐标方程得+=a+3, 化简得t2+t-a-2=0. 因为曲线C与直线l仅有唯一公共点, 所以Δ=1-4(-a-2)=0, 解得a=-. 5.(2017·广西第一次质量检测)已知直线l的参数方程为(t为参数),曲线C1的参数方程为(α为参数),以坐标原点为极点,x轴的正半轴为极轴建立极坐标系,且曲线C2的极坐标方程为ρ=4cos θ. (1)若直线l的斜率为2,判断直线l与曲线C1的位置关系; (2)求C1与C2交点的极坐标(ρ≥0,0≤θ<2π). (1)当斜率为2时,直线l的普通方程为y-1=2(x+1),即y=2x+3.① 将消去参数α,化为普通方程得(x-2)2+(y-4)2=4,② 则曲线C1是以C1(2,4)为圆心,2为半径的圆,圆心C1(2,4)到直线l的距离d==<2, 故直线l与曲线(圆)C1相交. (2)C2的直角坐标方程为x2+y2-4x=0, 由, 解得, 所以C1与C2交点的极坐标为. 6.(2017·河南省八市重点高中质量检测)已知曲线C的参数方程为(θ为参数),在同一平面直角坐标系中,将曲线C上的点按坐标变换得到曲线C′. (1)求曲线C′的普通方程; (2)若点A在曲线C′上,点D(1,3).当点A在曲线C′上运动时,求AD中点P的轨迹方程. (1)将代入, 得曲线C′的参数方程为, 所以曲线C′的普通方程为+y2=1. (2)设点P(x,y),A(x0,y0),又D(1,3),且AD的中点为P, 所以, 又点A在曲线C′上,所以代入曲线C′的普通方程+y2=1,得(2x-1)2+4(2y-3)2=4, 所以动点P的轨迹方程为(2x-1)2+4(2y-3)2=4. 7.(2017·河南省六市第一次联考)在平面直角坐标系中,直线l的参数方程为(t为参数),在以直角坐标系的原点O为极点,x轴的正半轴为极轴的极坐标系中,曲线C的极坐标方程为ρ=. (1)求曲线C的直角坐标方程和直线l的普通方程; (2)若直线l与曲线C相交于A,B两点,求△AOB的面积. (1)由曲线C的极坐标方程ρ=,得 ρ2sin2θ=2ρcos θ, 所以曲线C的直角坐标方程是y2=2x. 由直线l的参数方程(t为参数),得t=3+y,代入x=1+t中,消去t得x-y-4=0, 所以直线l的普通方程为x-y-4=0. (2)将直线l的参数方程代入曲线C的直角坐标方程y2=2x,得t2-8t+7=0, 设A,B两点对应的参数分别为t1,t2, 则t1+t2=8,t1t2=7, 所以|AB|=|t1-t2|=×=×=6, 因为原点到直线x-y-4=0的距离d==2, 所以△AOB的面积是|AB|·d=×6×2=12. 8.(2017·福建省毕业班质量检测)在平面直角坐标系xOy中,曲线C的参数方程为(α为参数),在以原点为极点,x轴正半轴为极轴的极坐标系中,直线l的极坐标方程为ρsin=. (1)求曲线C的普通方程和直线l的倾斜角; (2)设点P(0,2),直线l和曲线C交于A,B两点,求|PA|+|PB|. (1)由消去参数α,得+y2=1, 即曲线C的普通方程为+y2=1. 由ρsin=,得ρsin θ-ρcos θ=2,(*) 将代入(*),化简得y=x+2, 所以直线l的倾斜角为. (2)由(1)知,点P(0,2)在直线l上,可设直线l的参数方程为(t为参数), 即(t为参数), 代入+y2=1并化简, 得5t2+18t+27=0, Δ=(18)2-4×5×27=108> 0, 设A,B两点对应的参数分别为t1,t2, 则t1+t2=-<0,t1t2=>0, 所以t1<0,t2<0, 所以|PA|+|PB|=|t1|+|t2|=-(t1+t2)=.查看更多