- 2021-10-12 发布 |
- 37.5 KB |
- 25页

申明敬告: 本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。
文档介绍
电力行业智能巡检方案
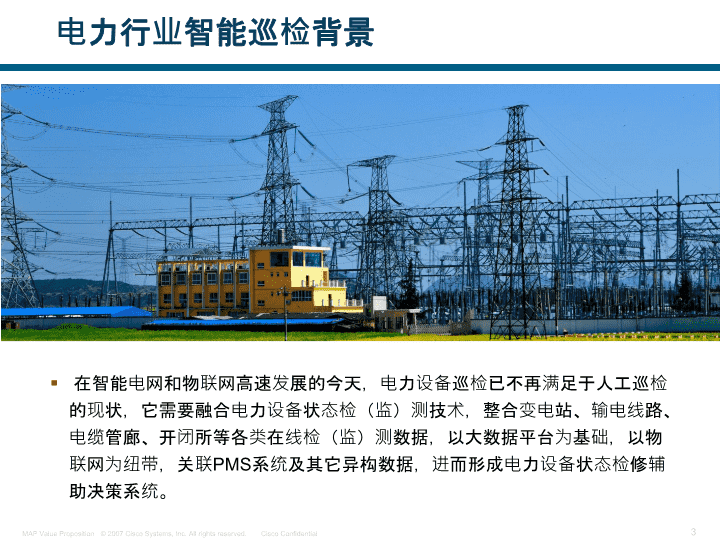
金惠科技 电力行业智能巡检方案 背景需求 解决方案 应用领域 汇报提纲 电力行业智能巡检背景 在智能电网和物联网高速发展的今天, 电力设备巡检 已不再满足于人工巡检的现状,它需要融合电力设备状态检(监)测技术,整合 变电站、输电线路、电缆管廊、开闭所等各 类在线检(监)测数据,以大数据平台为基础,以物联网为纽带,关联PMS系统及其它异构数据,进而形成电力设备状态检修辅助决策系统。 电力设备巡检现状 电缆隧道巡检 目前传统的电力电缆隧道巡检方法 ,主要依靠人工及少量环境监控器实现。 但是由于电力电缆 隧道 路程长 ,封闭性强,构造物多,通讯不便,有害气体存在,一旦出现突发事故, 将对巡检人员的人身安全造成极大威胁 。 变电站 等电力设备 巡检 传统设备巡检普遍采用的是人工巡视、手工纸介质记录的工作方式,该方式存在着人为因素多、管理成本高、无法准确考核巡检人员工作状态等明显缺陷 。 随着无人值守变电站的普及 ,改革传统落后 的 巡检方式 势在必行 。 电力设备巡检现状 输电线路 巡检 传统的巡检方式存在效率低、 质量差、危险度高、劳动强度大 等缺陷,环境条件恶劣的区域 更是如此。巡检方式的改变和提高迫在眉睫。 配电所 / 开闭所巡检 与变电站巡检类似,尽管现在有手持式智 能巡检仪器,但对于无人值守的站所仍存在着实时性不强、精确度不高、操作繁琐、人力资源浪费等缺陷。 背景需求 解决方案 应用领域 汇报提纲 智能巡检机器人系统解决方案 系统组成 机器人系统采用分层式控制结构,分为三层结构:信息采集层、运动层、通信控层。 智能巡检机器人系统 架构 组成 智能巡检机器人系统解决方案 系统组成 机器人系统采用分层式控制结构,分为三层结构:信息采集层、运动层、通信控制层。 智能巡检机器人子系统架构组成 ※ 电缆隧道吊轨巡检机器人 功能 红外热成像精确测温系统 可见光智能识别系统 声音采集系统 应急实时对讲系统 快速追踪识别系统 强大的告警联动系统 隧道环境监测系统(温湿度,有害气体含量,空气含氧量,隧道内 烟雾、火焰探测 ) 无缝漫游的MESH无线通信系统 先进的快速 无线充电 系统 多种巡检模式:定时巡检、周期巡检、不间断 巡检、特除巡检 自动穿越防火门功能 ※ 输电线路巡检无人机功能 红外热成像精确测温系统 可见光智能识别系统 无缝 漫游的MESH无线通信系统 多种 巡检模式:定时巡检、周期巡检、不间断 巡检、特除巡检 ※ 配电所 / 开闭所吊轨巡检机器人 功能 红外热成像精确测温系统 可见光智能识别系统 声音采集系统 应急实时对讲系统 无缝 漫游的MESH无线通信系统 先进的快速 无线自主充电 系统 多种巡检模式:定时巡检、周期巡检、不间断 巡检、特除巡检 吊 轨巡检机器人系统 架构图 系统组成 机器人系统采用分层式控制结构,分为三层结构:信息采集层、运动层、通信控制层。 站端服务器 站端服务器主要由监控计算机系统、网络集线器(HUB)或交换机、激光打印机以及相应的通讯设备组成。 ※ 变电站激光导航巡检机器人 功能 • 红外 热成像精确测温 系统 • 可见光智能识别(表计、油位、断路器及隔离开关合分状态)系统 • 音频 采集系统 • 应急 实时对讲系统 • 精 准的激光导航系统 • 无缝 漫游的MESH无线通信系统 • 先进 的快速 无线自主充电 系统 • 大 数据分析系统 • 多种 巡检模式:定时巡检、周期巡检、特殊 巡检 • 多站集中控制系统 ※ 变电站 磁导 航机器人功能 • 红外热成像精确测温系统 • 可见光智能识别(表计、油位、断路器及隔离开关合分状态)系统 • 音频采集系统 • 应急实时对讲系统 • 精准 的 磁 导航 系统 • 无缝漫游的MESH无线通信系统 • 先进的快速无线自主充电系统 • 大数据分析系统 • 多种巡检模式:定时巡检、周期巡检、特殊巡检 • 多站集中控制系统 磁(激光)导航机器人系统架构图 磁(激光)导航机器人系统架构图 智能巡检机器人软件系统 智能机器人巡检系统包括实时监控、信息查询、自主巡检、特殊巡检、遥控巡检等功能子系统。 系统可以实时呈现被监测设备的状态,以及巡检机器人在巡检环境中的状态 大数据分析与决策支持系统 大数据分析与决策支持系统可以对包含红外测温影像,紫外影像,红外测气体泄漏影像,超声局放信号,特高频局放信号,油中溶解气体图谱,介损电容量,暂态地电压,可见光影像和音频图谱进行分析;根据监测系统实时传送的输变电检测数据,利用红外测温、气体泄漏、可见光影像识别技术进行识别,对于异常信息进行报警;实现变电站设备在线检测、机器人带电检测数据的后台自动在线模式识别,自动判别缺陷及其风险程度,推送预警信息。 智能巡检机器人识别系统 噪声检测子系统是通过对声音数据的分析,自动判断变压器等电气设备是否处于正常工作状态。 红外测温子系统分析目标图像, 当目标范围内有超温的设备时,判断报警级别。按照电力行业标准自动形成红外测温报告。 表计识别子系统对可见光模块监测的图像进行实时处理,应用边缘检测、圆与椭圆拟合、指针检测角度化算法等实现,具有精度高、处理速度快等优势。 背景需求 解决方案 应用领域 汇报提纲 智能巡检机器人应用领域 变电站 变电站智能巡检系统以机器人适合室外全天候工作,是基于 可见光、红外热成像、 紫外、SF6泄漏状态检测等多功能的实用化变电站智能巡检机器人,是特种应用机器人在电网中应用的代表产品。 巡检机器人 将监测数据 通过 无线 通讯实时传输到 变电站 大数据系统,同时 与 其他在线检(监)测的数据 进行融合、 分析和处理,连同其它 变电站 的大数据信息传往上层的大数据处理中心,该中心再和PMS系统及其它异构数据进一步实时关联分析。这种多层的分布式网络构架,支撑了状态检修辅助决策系统的实时数据源,构成了数据采集、分析、预警及辅助决策的闭环系统。 智能巡检机器人应用领域 电力 隧道 采用隧道智能巡检机器人进行巡检,可实现不间断地反复巡检, 并对隧道状态的连续动态采集 ,补充了原有隧道内在线监测系统的不足,确保第一时间发现隧道内的突发情况。一旦发生火灾、恐怖袭击等恶性事故,智能巡检机器人可第一时间进入事故现场,把现场的视频、图像、空气中有害气体的含量、温度/湿度报警等数据发送回指挥中心。 智能巡检机器人应用领域 输电线路 采用 无人机对输电线路的导线、线夹、引流线等进行红外发热点检测,对杆塔倒塌、倾斜、线路断线、绝缘子脱落等现象进行快速分析识别。 智能巡检机器人应用领域 配电所 / 开闭所 结合室内实际情况,智能巡检机器人系统主要包括可见光视频巡视、红外热象仪视频巡视、自动定点设备照片存档、自动定点设备红外热图存档、自动定点设备温度检测存档(自动温度越限报警),设备历史温度分析。 智能巡检机器人应用领域 发电 厂 随着环保要求的提高,火力 发电厂 露天煤场 加装 遮护棚越来越普及。在棚内安装吊轨机器人可以实现自动盘煤、煤温检测、可视化监控等功能。 厂内升压变电站亦可用智能巡检机器人代替人工巡检。 谢谢!查看更多